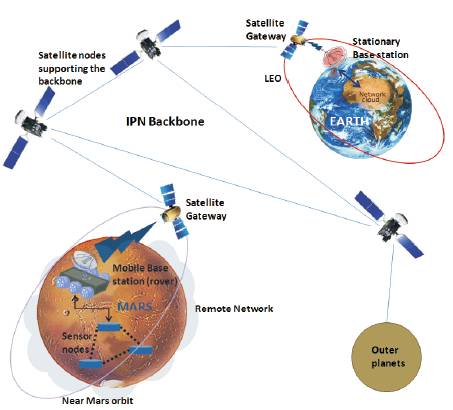
Figure 1. The future Deep space architecture
The Interplanetary Internet is a next-generation space network architecture proposed by NASA which aims to establish a communication infrastructure in deep space and connect planets and satellites etc. The vision of future space exploration includes missions to deep space that require communication among planets, moons, satellites, asteroids, robotic spacecrafts, and crewed vehicles. These missions produce significant amount of scientific data to be delivered to the Earth. IPN Internet is an often disconnected and store-and-forward 'network of Internet' based on a wireless backbone with huge delays and error prone links. The first application of IPN Internet may be the “Mars network” which is now being developed to facilitate the exploration of Mars. In this paper, with concern to establishing the paths among the nodes, rovers and in order to transfer data with an efficient and scalable manner Wireless Routing Protocol (WRP) which uses the Bellman Ford algorithm to calculate paths is implemented with simulation results. Because of the mobile nature of the nodes this protocol introduces mechanisms which reduce route loops and ensure reliable message exchange.
Space communications and networking researches has added a new engineering and scientific era to the history of space explorations. The developments in the space technologies in the last decade have enabled the realization of deep space scientific missions such as Mars exploration. These missions produce significant amount of scientific data to be delivered to the Earth. NASA enterprises have outlined significant challenges for development of next generation space network architectures. This idea further leads to the design and development of deep space networks is expected to be the Internet of the deep space planetar y networks and defined as the Interplanetary (IPN) Internet [2]. The International Space Station (ISS) is a very good example of such efforts. Moreover, with increasing deployments the IPN can gradually build up its backbone to help communicate with the far reaching planets of the solar system. It is clear that the Interplanetary Internet is expected to extend the current space communications capabilities to a point where the boundaries between the terrestrial and space communications become transparent. For example [5], the current communication infrastructure deployed for the NASA Deep Space Network (DSN) provides significant research and implementation experience which also constitutes the basis to step up the development of the required technologies for next generation deep space communications and hence the Interplanetary Internet.
A common infrastructure for interplanetary networking and distributed communication technologies are needed to support the scientific research and possible commercial applications in the near future [1]. Figure 1 shows is the graphical representation of the future earth base internet will be connecting with the remote networks of the solar system using satellite gateways and the IPN backbone. Figure 1 gives the future Deep space architecture in which the remote planet system communicating with the Earth based Internet with the help of IPN Backbone and Satellite gateways.
Figure 1. The future Deep space architecture
Building the space Internet on top of Internet technologies could enable any space mission to ''plug in'' with high quality of service and cost [1]. The three major architectural elements of the infrastructure can be summarized as follows:
The interplanetary backbone network provides a common infrastructure for communications among the Earth, outerspace planets, moon, satellites, and relay stations placed at gravitationally stable Lagrangian points of planets.
The interplanetary external network consists of groups of satellites flying in deep space between planets, clusters of sensor nodes, and groups of space stations, etc [2].
The planetary network, which is composed of planetary satellite network and planetary surface network, as shown in Figure 2, connects satellites orbiting a planet and ground stations, rovers, and mission elements on the planet surface. Figure 2. shows Planetary Network The hierarchical architecture of IPN Internet, special routing algorithms for IPN Internet are needed to realize the end-to-end communication in deep space environments

Figure 2. Planetary Network The hierarchical architecture
This architecture can be implemented at any outer space planet. Planetary satellite network composed of satellites which lie in multiple layers provides relay services between the Earth and the outer-space planets as well as communication and navigation services to the surface elements [2]. Planetary surface network provides the communication links between high power surface elements, such as rovers and landers and a power-stable wireless backbone in the planet. It also includes surface elements that cannot communicate with satellites directly.
Ad hoc network is a multi-hop wireless network, which consists of number of mobile nodes. These nodes generate traffic to be forwarded to some other nodes or a group of nodes. Due to a dynamic nature of ad hoc networks, traditional fixed network routing protocols are not viable. Based on that reason several proposals for routing protocols has been presented. Due to multiple and diverse ad hoc protocols there is an obvious need for a general taxonomy to classify protocols considered. Traditional classification is to divide protocols to table-driven and to source-initiated on-demand driven protocols [1].
Table-driven routing protocols try to maintain consistent, up-to-date routing information from each node to every other node. Network nodes maintain one or many tables for routing information. Nodes respond to network topology changes by propagating route updates throughout the network to maintain a consistent network view.
Source-initiated on-demand protocols create routes only when these routes are needed. The need is initiated by the source, as the name suggests [3]. When a node requires a route to a destination, it initiates a route discovery process within the network. This process is completed once a route is found or all possible route permutations have been examined. After that there is a route maintenance procedure to keep up the valid routes and to remove the invalid routes.
The taxonomy is based on to divide protocols according to following criteria, reflecting fundamental design and implementation choices [3] :
Protocols can be divided according to communications model to protocols that are designed for multi-channel or single-channel communications.
Structure of a network can be classified according to node uniformity. Some protocols treat all the nodes uniformly, other make distinctions between different nodes.
Protocols may be described in terms of the state information obtained at each node and / or exchanged among nodes.
The way to obtain route information can be a continuous or a regular procedure or it can be trigged only by on demand. On that basis the protocols can be classified to proactive and on-demand protocols.
The Wireless Routing Protocol (WRP) [6] is a proactive, destination-based protocol. WRP belong to the class of path finding algorithms. The typical feature for these algorithms is that they utilize information about distance and second-to-last hop (predecessor) along the path to each destination. Path-finding algorithms eliminate the counting-to-infinity problem of distributed Bellman- Fordalgorithms by using that predecessor information, which can be used to infer an implicit path to a destination and thus detect routing loops.
In WRP there is a quite complicated table structure and it has got four parameters and they are briefly explained below [6].
The distance table contains the distance of each destination node via each neighbor and the predecessor of destination reported by neighbor equivalent routing table contains the distance to the destination.
In WRP nodes exchange routing-table update messages only from a node to its neighbors. An update message contains such components as an update list.
When a link failure occurs the arrows next to links indicate the direction of update messages and the label in parentheses gives the distances and the predecessor to destination.
This table maintains the list of retransmitted messages. If there is no messages are to be sent the node sends the HELLO message in order to ensure the connectivity.
In Figure 3 there is a short example showing how WRP updates node's routing tables, when a link failure occurs. Link costs are as indicated in the Figure 3. The arrows next to links indicate the direction of update messages and the label in parentheses gives the distances and the predecessor to destination J. The figure focuses on update messages to destination J only.
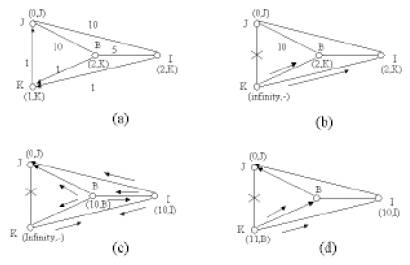
Figure 3. WRP Updates Nodes routing table
When link (J,K) fails, nodes J and K send update messages to forced to report an infinite distance to J as nodes B and I have reported node K as part of their path to destination J. Node B processes node K's update and selects link (B,J) to destination J. This is because of the property of WRP to force node B to remove any path to node J involving node K. Also, when node I gets node K's update message, it updates its distance table entry through neighbor K and checks for the possible paths to destination J through any other neighboring nodes. This results to select link (I,J) to the destination J as shown in Figure 3(c) Nodes I and B send their update messages to neighboring nodes, and K is able to get its path to node J through node B.
Finally as shown in Figure 3 (d), node K will send its update message to nodes B and I, but this will not affect the routing tables.
Bellman-Ford algorithm is used for finding the shortest path among the network. Implementation of the BellMan - Ford algorithm is described below with an example [4].
An oriented graph is given containing no contours with negative length (equal to the sum of weights of their arcs). Find the minimal paths from a given node to all other nodes of the graph.
This problem is a natural summary of the network planning problem. In this case minimal paths need to be found not only within a network, but also for a random path starting from a given node of the graph. One of the best-known algorithms for solving this dynamic optimization problem is Bellman-Ford's. It uses output information from distances matrix R. First the author consider a simple example which demonstrates the idea of Bellman-Ford's algorithm [4].
Figure 4 shows an oriented weighted graph with 4 nodes, containing 3 contours. Find the shortest distances from node 1 to all the other nodes.
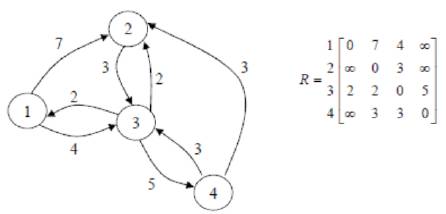
Figure 4. A Graph with three contours and its corresponding distance matrix
The variable Di stands for the sought minimal distance from node 1 to the i-th node. The solution goes through stages with and every stage includes a new node and the new values for Di is recalculated. This goes on until the resulting values can no longer get smaller. Variable k stands for the number of the stage. In the initial stage k=1 all Di are equal to the direct distance from node 1 to the corresponding node.
We need :
k =1, Di = R1i , i.e. D1 = 0, D2 = 7, D3 = 4, D4= ∞.
k =2, D1 = 0,
D2 = min from D2 and the sums of the remaining Di with the distances from the i-th node to the second node (second column of the matrix). We have:
D2 = min {7, 0+7, 4+2, ∞ +3}= 6, (the minimum is underlined).
Likewise for a minimum of D3 and the sums of the remaining Di with the third column of R:
D3 = min {4, 0+4, 7+3, ∞+3}= 4.
Likewise for D4 calculated as
D4 = min {∞, 0+, 7+, ∞∞4+5}= 9.
k = 3, Di = 0,
source the source (starting) vertex
V vertex set of the graph
V vertex set of the graph
d(a, b) the path cost (distance) from vertex a to vertex b
w(x, y) the weight of the edge connecting vertices x and y
Set d(source,source) = 0 and d(source,x) = +infinity, for all other vertices
Loop (|V| - 1) times
For each edge (x,y) of the graph:
if d(source,x) + w(x,y) < d(source,y) then
Let d(source,y) <-- d(source,x) + w(x,y)
For each edge (x,y) of the graph:
if d(source,x) + w(x,y) < d(source,y) then
Indicate that algorithm failed due to a negative-weight cycle
Indicate that the algorithm completed successfully
D2= min {6, 0+7, 4+2, 9+3}= 6.
D3 = min {4, 0+4, 6+3, 9+3}= 4.
D4= min {9, 0+, 6+, ∞4+5 } = 9.
We have reached a stage at which the results are the same as in the previous one and they can't get better. Therefore we've reached the minimal distances that we sought.
The calculations are written in the following table:
The last row shows the minimal path from 1 to every node. Legend.
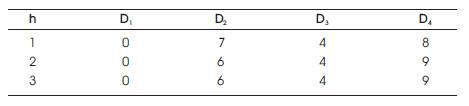
Table 1. Consists the value of Distant Matrix
For the sake of convenience the author consider the node for which minimal distances are sought as number 1.
This procedure is repeated until we get two identical rows of distance in the table or until n-2 is reached in the worst case.
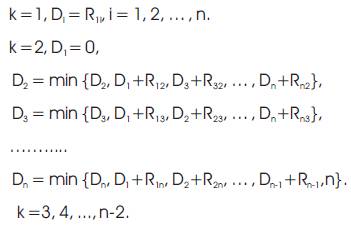
Let a given oriented weighted graph (V, E) with n nodes V and arcs E, which does not contain a contour with negative length. The aim is to find the minimal distances from node number p to all other nodes of the graph [4]. The distances matrix R is given and the sought distances are recorded in an array D. The number of stages obviously does not exceed n-2. Incoming and outgoing operations have been skipped.
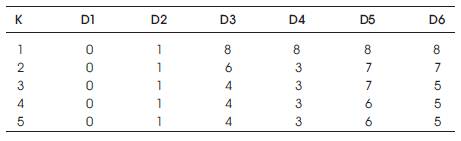
Table 2. Bellman-Ford Algorithm using Meta Language
begin
for v∈V do D[v]:=R[p,v]; D[p]:=0;
for k:=1 to n-2 do
begin for v∈V \ {p} do
for u∈V do D[v]:= min ( D[v], D[u] + R[p,v] )
end
end
The number of necessary arithmetical operations is O(n3).
Use Bellman-Ford's method for finding the minimal distances from node 1 to all other nodes of the graph shown in Figure 5
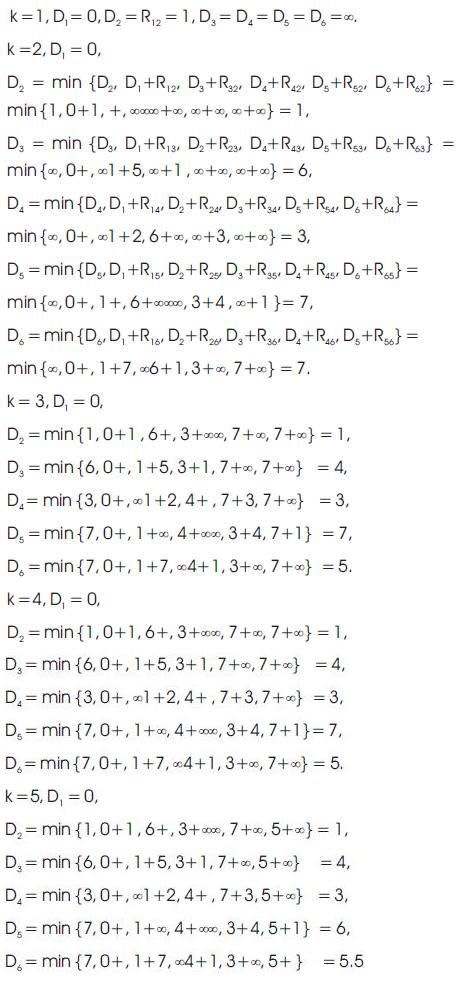
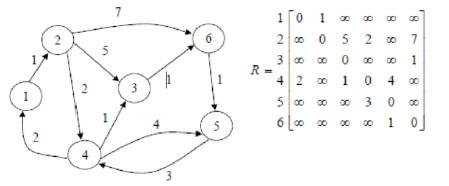
Figure 5. Oriented graph with six contours
The inadequacy of the current protocols in Interplanetary Backbone Network has already been known and the need for another transport protocol has been pointed out earlier. In order to address this need, a reliable transport protocol, Wireless Routing Protocol (WRP) with the implementation of BellMan –Ford Algorithm is been described in this paper. The objective of WRP combined with BellMan-Ford Algorithm is to address the challenges posed by the InterPlanetary Backbone Network for reliable data delivery and achieve high throughput performance. Since the WRP is a table driven protocol it satisfies the “Store and Forward”, constrain of the InterPlanetary Internet and hence the retransmission of the data are highly concentrated and with the help of BellMan-Ford Algorithm it assures acquiring the shortest path among the networks in order to transfer the message successfully.