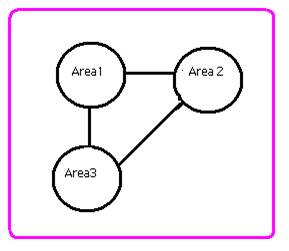
Figure 1. Block diagram of three area power system connected with tie-line
The main objective of Load Frequency Control (LFC) is to minimize the deviations in frequency and tie line power due to different load disturbances. This paper presents the Load Frequency Control of Multi Area Interconnected Power System with Three Single Area Systems using Conventional controllers and Artificial Intelligence(AI) based techniques such as Fuzzy and Artificial Neural Networks. The advantage of AI based controllers is that it can handle the non linear ties and at the same time it is faster than other controllers. Studies are carried out with Fuzzy and Fuzzy PID and compared with conventional controllers and finally it is concluded that AI based controllers give better performance. The techniques are implemented in MATLAB/SIMULINK.
The objective of modern power system is to transfer enough high quality real and reactive power produced by generating units to consumers through transmission lines. The system will be in equilibrium, when there is a balance between the power demand and the power generated. Load frequency control (LFC) is very important in power system operation and control for supplying sufficient and reliable electric power with good quality, especially interconnected power systems. The input to turbine must be continuously regulated to match the active power demand otherwise the system frequency will change which is not desirable. (A change in the electric power consumption will result in a deviation of the frequency from its steady state value). To maintain desired frequency, controllers are required.
In multi area system a change of power in one area is met by the increase in generation in all areas associated with a change in the tie-line power and reduction in frequency. In normal operating state the power system demands of areas are satisfied at the nominal frequency.
Controllers are used to maintain system frequency as nearly constant, thereby making the entire power system stable. Controller must be sensitive against changes in frequency and load. The most applied controllers are Proportional Integral (PI), Proportional Integral Derivative (PID). These conventional controllers generally require large settling time and high peak overshoot [1], [2]. To overcome above drawbacks, AI based controllers are implemented. This type of controllers take less settling time and reduce the oscillations, thereby maintaining the system actual frequency as quickly as possible.
This paper presents both conventional and AI based controllers on a three area interconnected power system.
A three area system consists of three single area systems connected through a power line called tie-line as shown in Figure 1. The tie-line allows electric power to flow between areas. Information about the local area is found in tie-line power fluctuations [3]. Therefore, the tie-line power is sensed and the resulting tie-line power is fedback into all areas. It is conveniently assumed that each control area can be represented by its equivalent governor, turbine and generator. [1]
Figure 1 shows the block diagram representing the three area power system. Each power area has a number of generators which are closely coupled together so as to form a coherent group, i.e. all the generators respond in unison to changes in the load. Such a coherent area is called a control area in which the frequency is assumed to be same throughout in static as well as dynamic situations.
Figure 1. Block diagram of three area power system connected with tie-line
Most commonly used conventional controllers are P, PI, PID controllers. Depending upon the type of controller used, the response of the system varies. In feedback control system, a controller is introduced to modify the error signal and to achieve better control action. The introduction of controller will modify the transient response and steady-state response of the system.
In this paper integral and proportional integral derivative controller is applied on a three area interconnected power system to achieve the desired frequency [1] [4]. The simulation diagram of a three area power system with PID controller is shown in Figure 2.
Due to the complexity and multi-variable nature of power systems, conventional control methods have not provided satisfactory solutions. Therefore AI based controllers are proposed. In this paper Fuzzy, ANN and Fuzzy-PID based controllers are implemented.
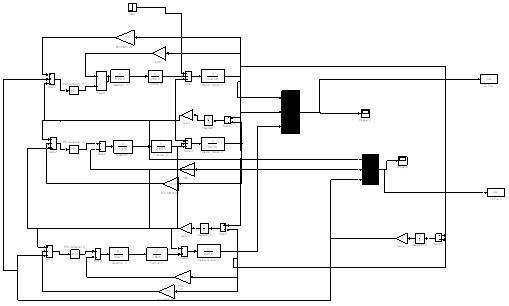
Figure 2. Simulation diagram of a three area power system with PID controller
There are three principal elements in a fuzzy logic controller:
Fuzzy control is based on a logical system called fuzzy logic. It is much close in spirit to human thinking than classical logical systems. The fuzzy logic control has been tried to handle the robustness, reliability and nonlinearities associated with power system controls [4]. Therefore a Fuzzy Logic Controller (FLC) becomes nonlinear and adaptive in nature having a robust [8] performance under parameter variations with the ability to get desired control actions for complex, uncertain and non-linear systems without their mathematical models and parameter estimation.
This paper proposes a fuzzy controller with 49 rules (7X7) and fuzzy PID controller with 25 rules (5X5). Under 49 rule, 7 membership functions are used- Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (ZE), Positive Small (PS), Positive Medium (PM) and Positive Big (PB).
Figure 3 shows FLC consisting of two inputs: Area Control Error (ACE) and Derivative of Area Control Error (DACE).
The defuzzification method employed is centroid method. Table 1 shows fuzzy rules based on which FLC works.
The simulation diagram of a three area power system with FUZZY controller is shown in Figure 4.
The frequency of three area power system using fuzzy logic controller is oscillatory in nature. To reduce these oscillations and to improve frequency response, Artificial Neural Networks (ANN) is used.
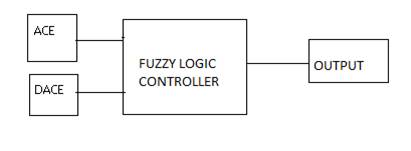
Figure 3. FUZZY controller
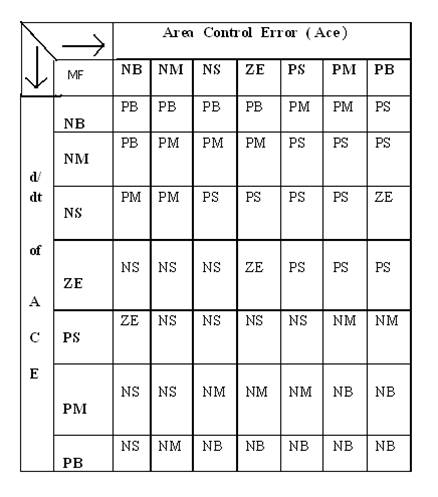
Table 1. Fuzzy Rules
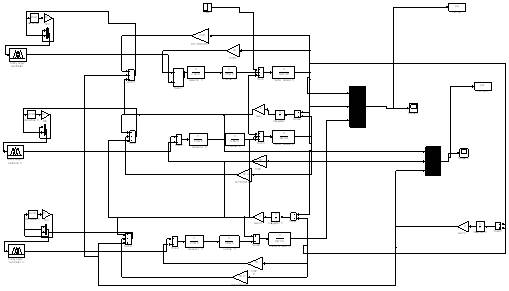
Figure 4. simulation diagram of a three area power system with FUZZY controller
In the conventional structure of an artificial neural network, a neuron receives its inputs either from other neurons or from the neural sensors. A weighted sum of these inputs constitutes the argument of a 'fixed' nonlinear activation function. The weights correspond to the synapses in a biological neuron while the activation function is associated with the intercellular current conduction mechanism. The resulting value of the activation function is the neural output. This neural output is branched out to other processing units. Each neuron is composed of two units: the inhibitory (negative) unit (Neti) and excitatory (positive) unit (NetE ).
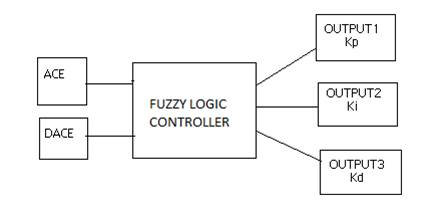
Figure 5. FUZZY-PID Controller
In this paper ANN is used to reduce the oscillations and to improve frequency response.
The simulation diagram of two area power system with ANN is shown in Figure 6.
The fuzzy PID controller requires three outputs. Figure 5 shows FUZZY PID controller.
The simulation diagram of a three area power system with FUZZY-PID controller is shown in Figure 7.
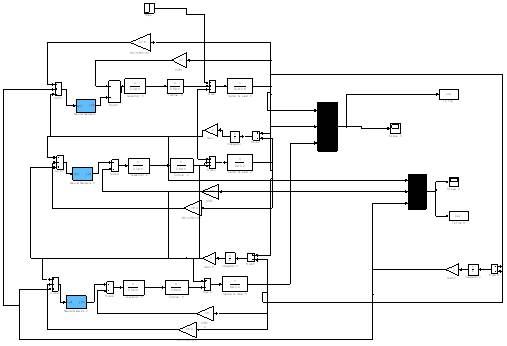
Figure 6. Simulation diagram of a three area power system with ANN
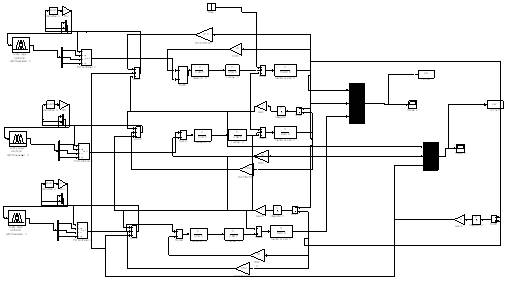
Figure 7. Simulation diagram of a three area power system with FUZZY-PID controller
When a three area power system is operated without any controller, both transient and steady-state responses are poor and the results are shown in Figure 8 (a) and Figure 8 (b).
When a three area power system is operated with conventional controller, both transient and steadystate responses are improved. The results are shown in Figure 9(a), Figure9(b) for Integral (I) controller and in Figure 10(a), Figure 10(b) for PID controller.
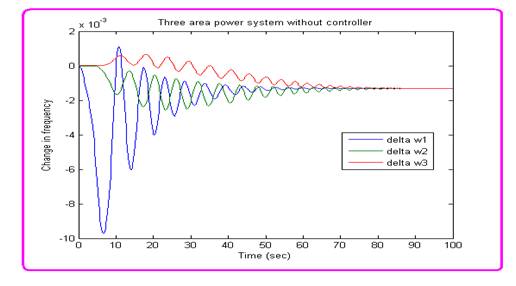
Figure 8(a). Frequency deviation without controller
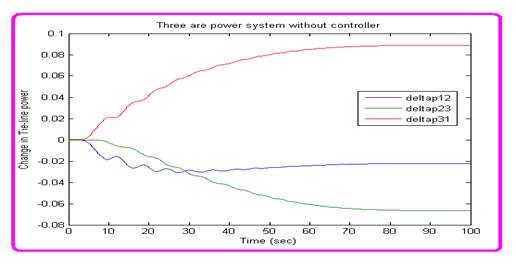
Figure 8(b). Power deviation without controller
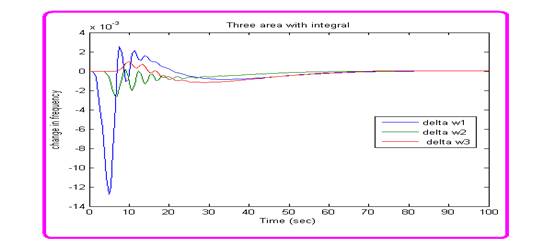
Figure 9(a). Frequency deviation with I- controller
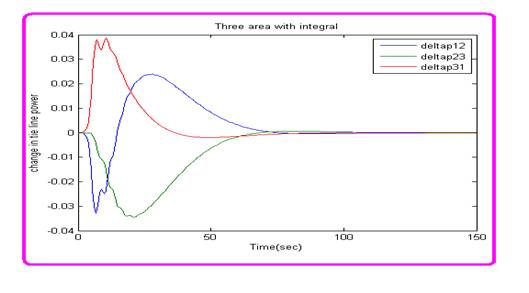
Figure 9(b). Power deviation with I- controller
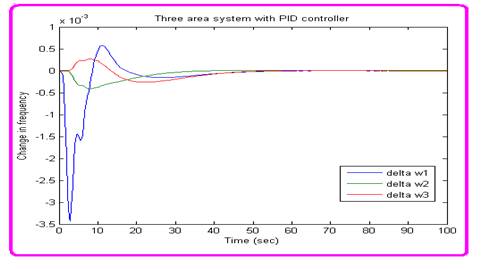
Figure 10(a). Frequency deviation with PID controller
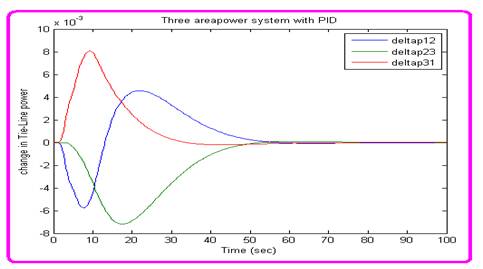
Figure 10(b). Power deviation with PID controller
When a three area power system is operated with FLC, both transient and steady-state responses are improved compared to case1 and transient response is improved when compared to case2. The results are shown in Figure 11 (a) and Figure 11 (b).
When a three area power system is operated with above Controllers, they have more oscillations in transient behavior. These oscillations are reduced by introducing ANN. The results are shown in Figure 12(a) and 12 (b).
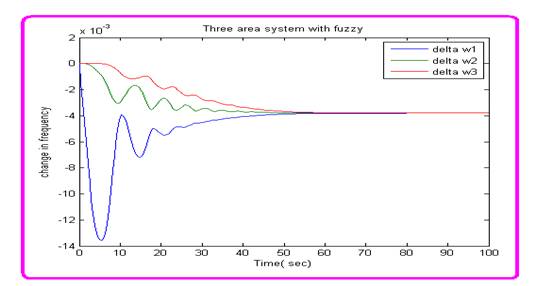
Figure 11(a). Frequency deviation with FLC
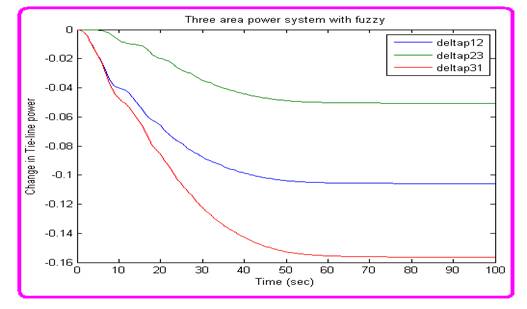
Figure 11(b). Power deviation with FLC
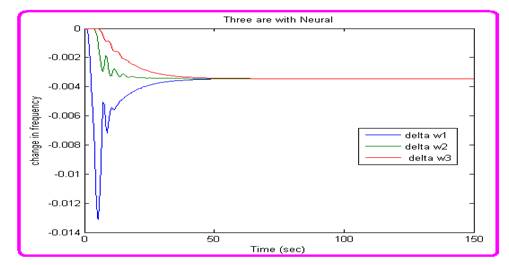
Figure 12(a). Frequency deviation with ANN
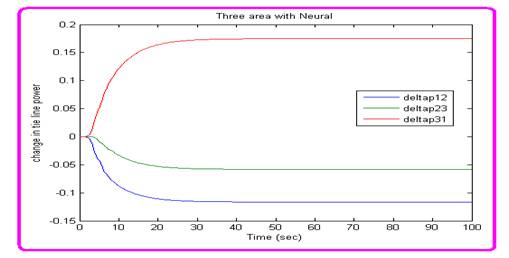
Figure 12(b). Power deviation with ANN
When a three area power system is operated with FUZZY PID Controller, both transient and steady-state responses are improved, compared to case1, case2, case3 and case4. The results are shown in Figure 13 (a) and Figure 13 (b).
The load frequency control of a three area interconnected power system[5],[6] using different controllers proposed in this paper are discussed and results are compared. The comparisons are shown in Tables 2, 3,4,5,6 and 7.
Table 8 shows the Parameters.
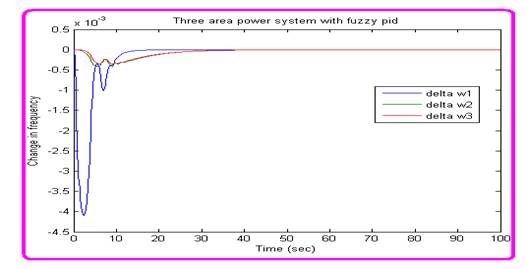
Figure 13(a). Frequency deviation with FUZZY PID
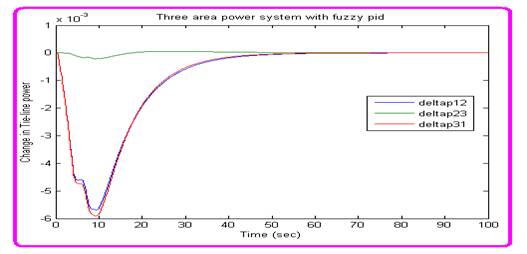
Figure 13(b). Power deviation with FUZZY
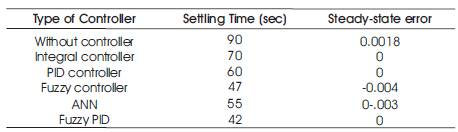
Table 2. Comparison of frequency deviation of Area1
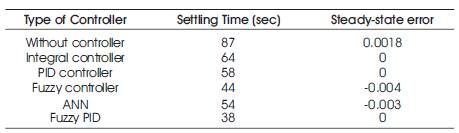
Table 3. Comparison of frequency deviation of Area2
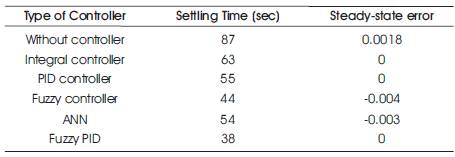
Table 4. Comparison of frequency deviation of Area3
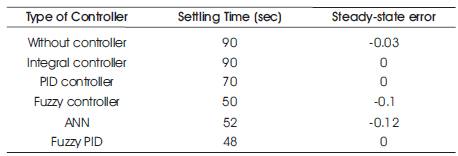
Table 5. Comparison of change in power between Area- 1&2
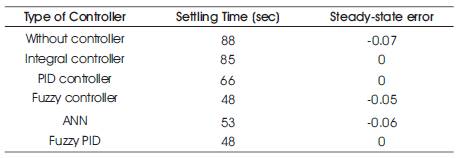
Table 6. Comparison of change in power between Area- 2&3
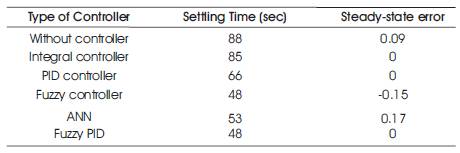
Table 7. Comparison of change in power between Area- 1&3
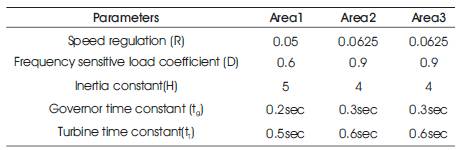
Table 8. Parameters
The load frequency control [10] of a multi area interconnected power system using conventional and AI based controllers are implemented and the results are compared. Introduction of above controllers minimize the frequency and power deviations of a two area power system.
In this paper by comparing all the controllers, it is concluded that AI based controllers (Fuzzy PID and ANN) give better transient and steady- state response.
Base power = 1000MVA, Nominal frequency = 60Hz, Synchronizing power coefficient = 2 P.U, Load change in area1= 0.1875 P.U