In this paper, Load Frequency Control (LFC) of two area power system in deregulated environment using PI controller was studied. A two area system is considered in which all areas are interconnected by normal AC tie-lines. In each area there are two GENCOs and two DISCOs. DISCOs can buy power from GENCOs in their own area or from other areas. In the proposed system, the effects of bilateral contracts between DISCOs and GENCOs are also considered. The performance of the PI controller is tested on a deregulated two area load frequency control system for different operating conditions using MATLAB Simulink tool. The results show that performance of PI controller is effective in reducing steady state error.
Electrical energy is an essential ingredient for the all-round development and industrial development of any country. Electrical energy generation and transmission can be made more economical and reliable with the help of interconnected power system. Hence, interconnected power system controllers are set for a particular operating condition and these controllers control the generation with respect to changes in demand without frequency exceeding the limit [3]. All devices are designed to operate at a standard frequency. Therefore, it is necessary to supply sufficient and reliable electric power with good quality[9]. The main aim of Load Frequency Control (LFC) or Automatic Generation Control (AGC) is to maintain the frequency of each area and tie-line power flow by adjusting the MW outputs of AGC generators so as to accommodate changing demand [5,6]. In 1996, the US Federal Energy Regulatory Commission (FERC) issued order 888, ruling on open access transmission known as electricity deregulation [1,2]. Deregulated system will consist of Generation Companies (GENCOs), Distribution Companies (DISCOs), Transmission Companies (TRANSCOs) and Independent System Operator (ISO) [4,9]. In deregulated power system, DISCOs in each area cancontract with GENCOs in same area or other areas. In the restructured power system, there are number of GENCOs and DISCOs and a DISCO can have contract with any GENCO for buying power.
These types of transactions are called “bilateral transactions”. The transactions are made through an entity called Independent System Operator (ISO). Hence one of the functions of ISO is to control generation and there by frequency in a restructured power system.
In the conventional vertically integrated utility, the generation, transmission and distribution are owned by same utility. But in restructured or deregulated power system generation, transmission and distribution are owned by three different entities. The main objective of electric power restructuring is to significantly reduce the cost of power charged to small businesses and consumers [7].
In the restructured environment, GENCOs sell power to various DISCOs at competitive prices and also the DISCOs can buy power from any GENCOs [6]. Thus DISCOs can have contract with GENCOs in their own area or other areas. Therefore there will be various combinations of GENCO-DISCO contracts which are possible. In order to identify the contracts of DISCOs with GENCOs, the concept of DISCO participation matrix was introduced [8].
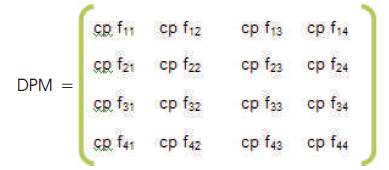
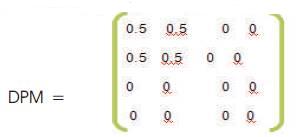
DPM is a matrix with the number of rows equal to the number of GENCOs and the number of columns equal to the number of DISCOs in the system. Each element in the matrix is a fraction of the total power contracted by a th DISCO (column) toward a GENCO (row). Thus, the ij entry corresponds to the fraction of the total load power contracted by DISCO j from a GENCO i. The sum of all the elements in a column in this matrix is unity. The matrix is called “DISCO participation matrix”, because it shows the participation of a DISCO in a contract with a GENCO. The notation follows along the lines of [4,5].Consider a twoarea system in which each area has two GENCOs and two DISCOs in it. Let GENCO1, GENCO2, DISCO1, and DISCO2 be in area I and GENCO3, GENCO4, DISCO3, and DISCO4 be in area II as shown in Figure 1.
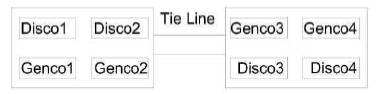
Figure 1. The configuration of two area deregulated Power system
Where cp represents contract participation factor. For example, the fraction of the total load power contracted by DISCO2 from GENCO1 is represented by [1,2] entry.
Off diagonal blocks represent the demands of the DISCOs in one area to the GENCOs in another area. In the deregulated case, when the load demanded by a DISCO changes, a local load change is observed in the area of the DISCO. There are number of GENCOs in each area and therefore Area Control Error (ACE) signal must be shared by these GENCOs in proportion to their contributions[9]. The coefficients, which represent this sharing, are called as ''ACE participation factors (aps)''. In deregulated power system, any DISCO can demand power from all of the GENCOs. These demands are determined by cps, which are contract participation factors, as load of the DISCO. Figure 2 shows the deregulated power system In the case of two-area power system, scheduled steady state power flow on any tie-line is given as follows:


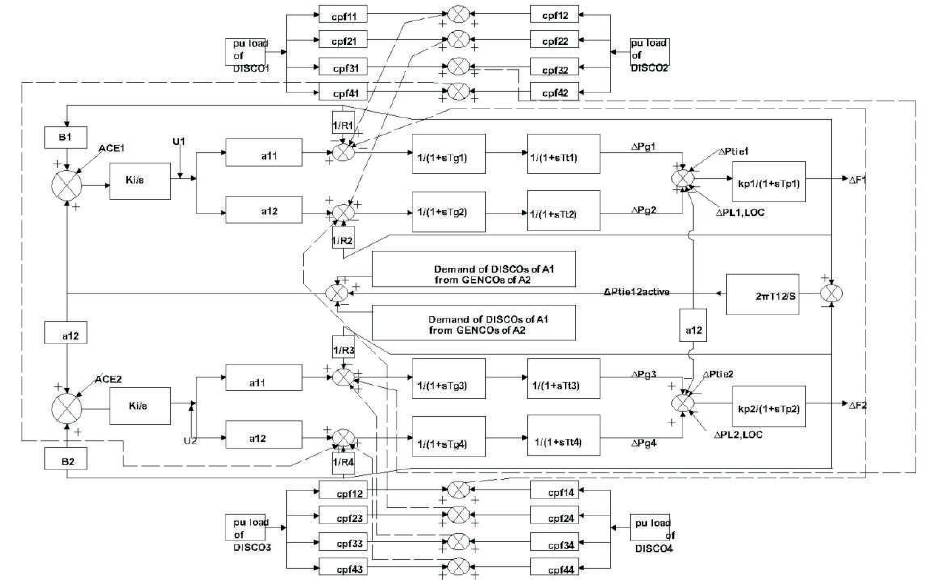
Figure 2. Block diagram of two area deregulated power system
The PI controller used is the combination of the Proportional mode and the integral mode. The main advantage of this PI control mode is that the one-to one correspondence of the proportional mode is available and the integral mode eliminates the inherent offset [4]. The proportional gain, by design, also changes the net integration mode gain, but that the integration gain can be independently adjusted [12]. When the error is zero, the controller output is fixed at the value that the integral term had, when the error went to zero. If the error is not zero, the proportional term contributes a correction and the integral term begins to increase or decrease the accumulated value depending on the sign of the error and the direct or reverse action. The integral term cannot become negative. Thus it will saturate at zero if the error and action try to drive the area to a net negative value.
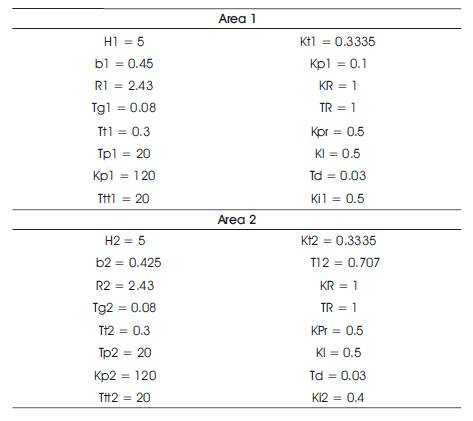
For analysis, a two area thermal power system is considered, in which each area consists of two generating companies and two distribution companies.
The proposed two area system is simulated for step load perturbation using conventional integral controller. The values of system parameters are given in appendix. Generating companies in each area participate equally in load frequency control. ACE participation factors are given by apf1 = 0.5, apf2 = 0.5, apf3 = 0.5 and apf4 = 0.5. The distribution company participation matrix is given by
Case 1: For a load increase of 0.01 pu that occurs in area 1 and area 2, the frequency deviation in areas 1 and 2 and tie line power flow are as shown in Figure 3(a),3(b) respectively.
Case 2: For a decrease in load of 0.01 pu that occurs in area 1 and an increase in load of 0.01 pu that occurs in area 2 the frequency deviation in areas 1 and 2 and tie line power flow are as shown in Figure 4(a) and 4(b) respectively.
Case 3: For a load increase of 0.015 pu that occurs in area 1 and a load increase of 0.02 pu that occurs in area 2, the frequency deviation in areas 1 and 2 and tie line power flow are as shown in Figure 5(a) and 5(b) respectively.
Case 4: For a decrease in load of 0.015 pu that occurs in area 1 and an increase in load of 0.02 pu that occurs in area 2, the frequency deviation in areas 1 and 2 and tie line power flow are as shown in Figure 6(a) and 6(b) respectively.
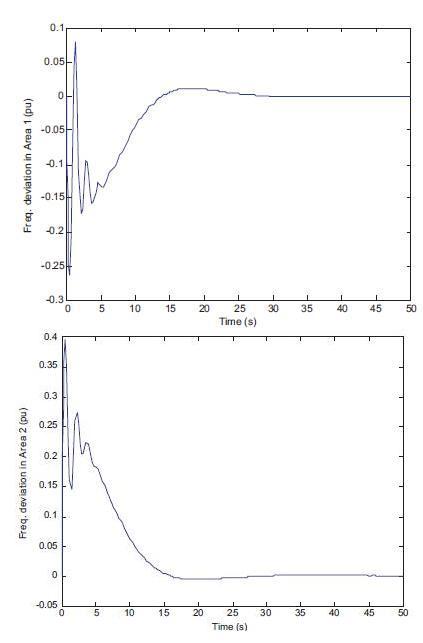
Figure 3(a). Frequency deviation in area 1 and 2
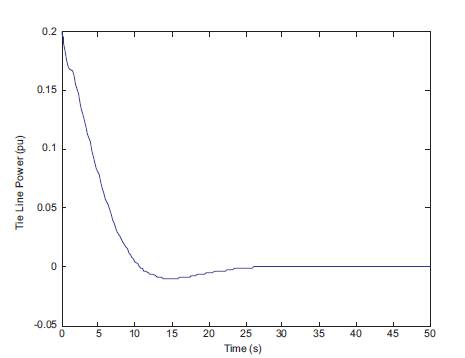
Figure 3(b). Tie line power flow between area 1 and 2
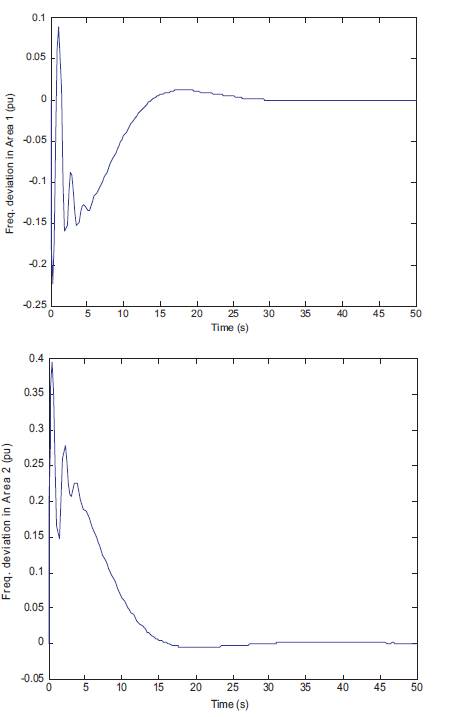
Figure 4(a). Frequency deviation in area 1 and 2
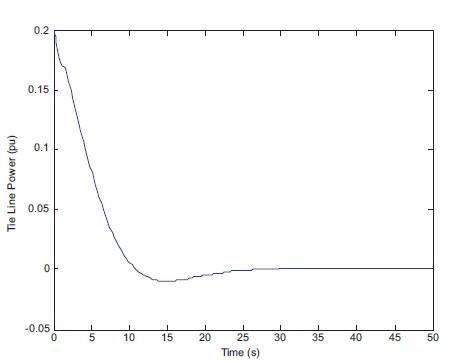
Figure 4(b). Tie line power flow between area 1 and 2
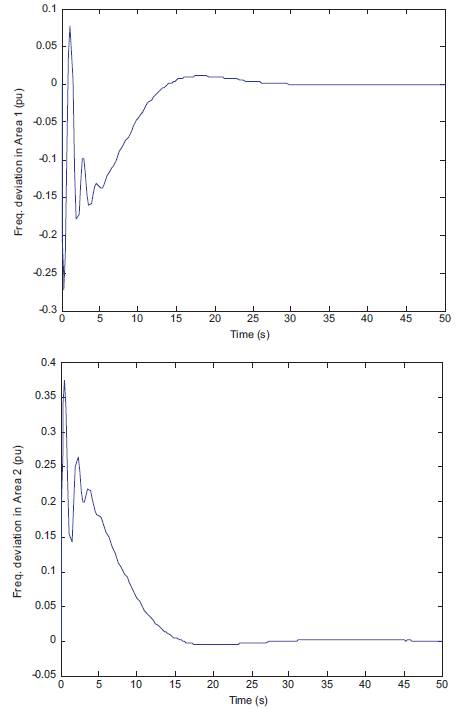
Figure 5(a). Frequency deviation in area 1 and 2
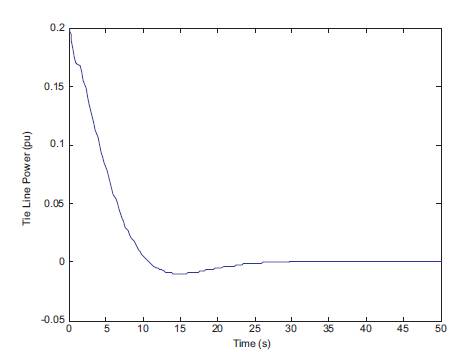
Figure 5(b). Tie line power flow between area 1 and 2
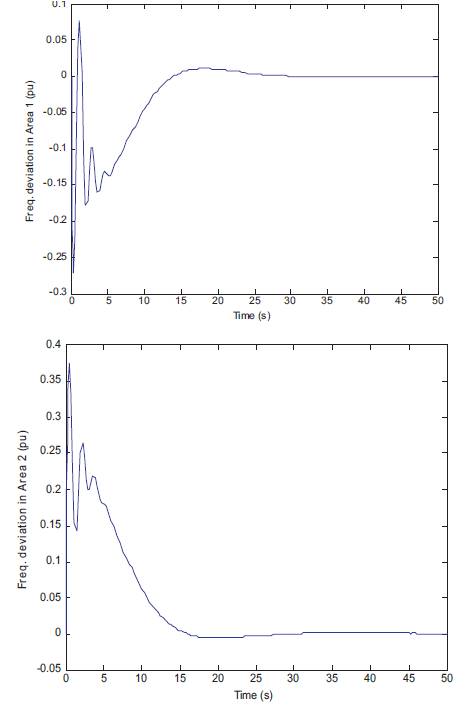
Figure 6(a). Frequency deviation in area 1 and 2
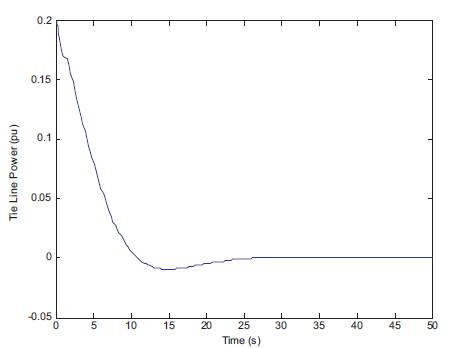
Figure 6(b). Tie line power flow between area 1 and 2
A two area power system for Load Frequency control in deregulated environment is considered to demonstrate the proposed method. Simulation studies with PI controller based LFC under various disturbances show that the steady state error is reduced to zero.