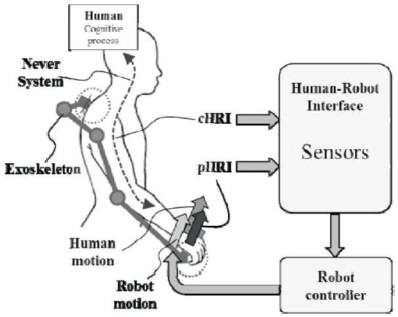
Figure 1. Concepts of Human-Robot Interaction and Human-Robot Interface (Lee et al., 2012)
Various types of research have been conducted to assist in the development of soldiers in the military by providing them with exoskeleton suits that can provide extra strength, reduce fatigue, and provide protection. The main aim of the research is to develop a light-weight and increased strength exoskeleton. This paper reviews the researches of the current trends and advancements of exoskeletons in various fields, and how they can be incorporated with military purpose. The tests were conducted separately for the upper limb and lower limb suits. The upper limb exoskeletons were tested by performing overhead tasks with and without suit in both active and passive state. In the same way, lower limb exoskeletons were tested by performing lower body exercise and walking with and without suits by carrying weights. The results from different studies revealed a significant reduction in muscle activity on wearing an exoskeleton suit. These exoskeleton suits can be implemented to assist humans/soldiers in difficult tasks, which may require additional strength, consequently saving time and energy. So far only the upper and lower extremity suits have been developed. An entire body suit may demand more resources and capital. Exoskeletons will have their significance in the military, not only for domestic purposes but also during battlefield and crises.
An exoskeleton is a wearable exterior machine which is designed based on human-robot interaction to provide the wearer with additional strength and support. It is a biomechanical structure that senses the wearer's motion through artificial intelligence. The concept of human-robot interaction is shown in Figure 1, taken from Lee et al. (2012). The concept of exoskeleton has not been caught in the 20th century. Earliest known exoskeleton-like machine named 'Hardiman' has been designed by a Russian Engineer, Nicholas Yagn, in 1890, which used compressed gas as energy (Agrawal et al., 2016; Lee et al., 2012). Later many researches were carried on exoskeleton for medical, industry and rehabilitation purpose. Currently, the USA, Japan, and Europe are the countries actively researching on exoskeletons since late 1990s (Lee et al., 2012). In medical science, exoskeleton serves its purpose by assisting disabled people by restoring the function of that specific body part by functioning in a mannered way. Contrarily, the military is currently financing such researches to reinforce the power of soldiers in field because of their significant purpose of carrying load to mobile places (Agrawal et al., 2016). Based on muscle strength supporting, exoskeleton can be classified into the upper limb system, lower limb system and specific joint support system (Lee et al., 2012). Based on their power state, they can be classified into active systems and passive systems. An active system requires an external power source whereas a passive system does not require any source of power (Mudie et al., 2018).
An exoskeleton covering the body needs to be light-weight, flexible and dynamic to meet the particular task required to be done. This compels a great challenge for the mechanism style. A concept of the application of exoskeleton with human activity and the robotic response is shown in Figure 1.
Figure 1. Concepts of Human-Robot Interaction and Human-Robot Interface (Lee et al., 2012)
As discussed by Wang et al. (2011), electric motors are the most common actuator in exoskeleton, even though they cannot provide sufficient high peak, average power and force/torque output. They normally require high-ratio, heavy reducer to produce the speeds and high torques for human locomotion. Studies on the human muscle-tendon system have shown that muscles (including tendons and ligaments) function as a spring, and by storing energy and releasing it when required, locomotion becomes more energy efficient. In this research, the collected gait data (The mechanical energy of the human body can be measured. This includes the application of basic theories regarding the mechanical structure and behaviors of the body. Gait analysis checks the calculated quantity by comparing it, or other similar quantity, with experimental results in a collection of selected cases) (Grimmer et al., 2012) and examine them to identify the spring property of the human muscle-tendon system.
Wang et al. (2011) investigated the potential reduction in power and torque demands on actuators (mainly electric motors) by using series elastic actuation (SEA) and parallel elastic actuation (PEA) in the exoskeleton as shown in Figure 2. He proved from theoretical optimization results that parallel springs reduced the peak torque by 66% in hip flexion/extension (F/E), 53% in hip abduction/adduction (A/A) and 48% in ankle dorsi/plantar flexion (D/PF), respectively, and the RMS power by 50%, 45%, and 61%, respectively. By adding a series spring (forming a SEA) it reduced the peak power by 79% for ankle D/PF, and by 60% for hip A/A. A SEA does not reduce the peak power demand at other joints. Accordingly, Grimmer et al. (2012) and Plooij et al. (2016) compared SEA and PEA in their study and observed that parallel elastic elements can minimize the peak torque, energy and power of an actuator in contrast to series element.
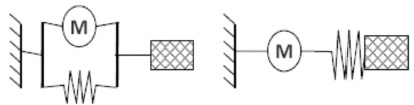
Figure 2. PEA (left) and SEA (right) (Wang et al., 2011)
The explanation for PEA's efficiency is that the parallel spring generates some of the torque desired to implement the task, decreases the sufficient torque of the actuator and minimizes the energy consumption (Cappozzo, 1984).
As discussed earlier, active exoskeleton needs continuous source of power. That is why passive systems were developed, to provide energy efficient walking without any need for additional power. Van Dijk et al. (2011) assumed that by minimizing mechanical joint work, the metabolic energy decreases. Multiarticular tendons in humans and animals serve as an elastic energy buffer and link between the joints. This mechanism lowers the network on the joint. But however the tendons function like a muscle in sequence, so it takes physical energy to relax the tendon. It implies that without the energy expenditure, the machine cannot be used. Elastic elements (artificial tendons) are used in conjunction with muscle tendon system to overcome this problem. The main objective of Wietse van Dijk's study was to investigate if the energy spent in walking can be reduced by applying artificial tendons. This was done by designing and evaluating an artificial tendon exoskeleton. The experiment was performed on a group of nine individuals. Standard walking, walking without artificial tendons with the exoskeleton, and walking with artificial tendons with the exoskeleton were all tested to assess energy intake and muscle activation. Standard walking was the most energy efficient. However walking with exoskeleton's artificial tendons reflected in a fairly minimal decrease in energy consumption. The maximum reduction was 40% in simulation.
Wearable exoskeletons are dramatically emerging for occupational use, and could be an excellent alternative or support to existing methods to interference. In certain cases, the use of exoskeletons may require partial modification to an existing workplace (and so might be less expensive), and could be useful for a wide range of tasks. Therefore it is recommended that exoskeletons retain the benefits of human creativity and flexibility, and further enhance their potential in various occupations. Three passive exoskeleton models were tested and compared in a mock drilling experiment by Alabdulkarim et al. (2019) in terms of physical parameters (perceived exertion and muscle stimulation) and reliability, at three precision levels, specified by the appropriate hole dimensions. The designs under investigation were: 1) An exoskeleton of the upper body which mainly supports the shoulder, 2) full body, and 3) exoskeletons of the upper body. Higher precision demands increased some muscle activation levels and degraded efficiency, which was relatively a consistent observation across exoskeleton designs. The shoulderfocused exoskeleton lowered shoulder demands although the highest precision requirement seemed to minimize quality.
Work-related Musculoskeletal Disorders (WMSDs) of the upper extremities are a key issue at modern workplace. Prolonged muscle contraction can curb blood flow and further facilitate fatigue. Carrying the weight of hand tools in overhead work will necessarily require static postures, as well as exerting manual forces and promoting the upper limb's deviated posture. To overcome this, Huysamen et al. (2018) conducted an experiment, with an aim to examine the impact of passive exoskeletal upper body on muscle movement, perceived musculoskeletal energy, perceived local strain and subjective efficiency for static overhead activities. Eight individuals, 4 male and 4 female, carried a load of 0 kg and 2 kg both with and without exoskeleton three times overhead for a duration of 30 s each. For the Biceps Brachii and Medial Deltoid muscle activity had been significantly reduced by 49% and 62% by the 2 kg load device. The perceived arms activity with the same model significantly reduced by 41%. As a result, the exoskeleton reduced muscle activity and no negative effects were seen respect to localized muscle discomfort and perceived effort. Hyun et al. (2019) developed a novel passive type upper arm exoskeleton vest called Hyundai Vest Exoskeleton (H-VEX), sponsored by R & D Division of Hyundai Motor Company, Korea. H-VEX presented two key mechanical structural elements: (1) an energy-storage multi-linkage mechanism dissipating spring-loaded energy according to angle-increment of a wearer's upper arm, and (2) a poly-centric shoulder joint mechanism on the transverse plane for its proper alignment with a wearer's shoulder joint movement. The efficacy of H-VEX had been evaluated by activation signals of electromyography (EMG) on main corresponding muscles of ten subjects carrying out overhead manipulation tasks, were measured and compared with cases without wearing the exoskeletal vest. The statistical analysis on the obtained EMG signal shows that the assistive torque offered by H-VEX significantly reduced activation of the shoulder related muscles during target tasks.
A novel curved pneumatic muscle based rotary actuator with joint torque control proposed for wearable elbow exoskeleton was developed and proposed by Zhang et al. (2008) and its novel curved PMA rotary actuator is shown in Figure 3. The principle and basic design of PMA is given in Figure 4. In terms of compactness, the pneumatic muscle actuator (PMA) has substantial advantages over traditional geared servo-electric motors, hydraulic actuators and pneumatic cylinders. This novel structure weakens the link between the output torque/force and the contacting displacement of the PMA, so that it is efficiently used in torque/force-feedback tele-robotics or in interesting rehabilitation applications for a wide range of tasks. In a set of experiments, the actuator displayed both good static and dynamic performance that had evaluated the models and the control strategy.
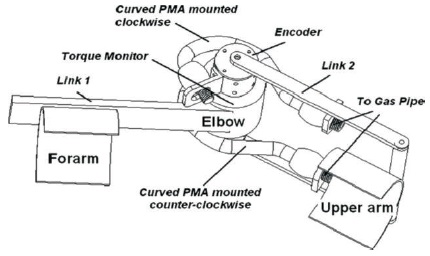
Figure 3. Novel Curved PMA Rotary Actuator in the Wearable Elbow Exoskeleton (Zhang et al., 2008)
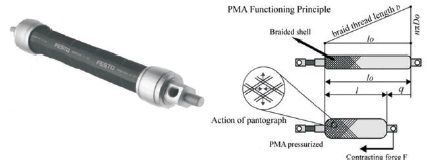
Figure 4. Basic Design of PMA and its Functioning Principle (Zhang et al., 2008)
Lee et al. (2014) developed a human-robot upper limb exoskeletal co-operation controller which offers three degrees of freedom by virtue of an electrical actuator, one which is mainly controlled by force sensor signals. Then, these signals were utilized to generate the torque required to operate the exoskeleton. They conducted control stability and load handling tests to investigate the efficiency of the controller, proving the effectiveness of the proposed controller. The human-robot cooperation controller suggested in this study is shown in Figure 5 and it has been recognized to be suitable for upper limb exoskeletons developed to carry heavy objects.
The mechanical design of lower-limb exoskeletons unveils critical features that determine their functions based on wearable robotics and human–robot interface. The human musculoskeletal system, followed by the exoskeletal parts in parallel, has complicated structures that enable varying degrees of freedom (DoFs), but the space/weight of robotic suits is constrained to allow or actuate all the human body's DoFs.
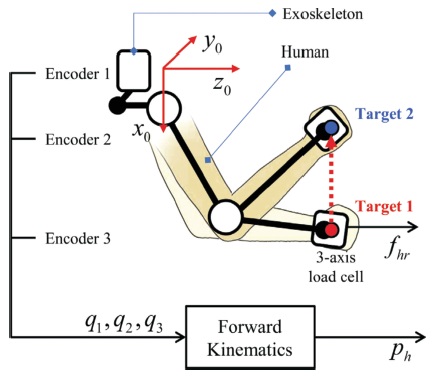
Figure 5. Experimental Setup for the Verification of the Human–Robot Cooperation Controller (Lee et al. 2014)
Figure 6 shows the structure of lower extremity exoskeleton, as proposed by Kang et al. (2018).
1. Shoe body,
2. Ankle joint component,
3. Leg inner rod,
4. Tight buckle,
5. Leg outer rod,
6. Hydraulic device of knee joint,
7. Thigh outer rod,
8. Thigh inner rod,
9. Hydraulic device of hip joint,
10. Cam connector,
11. Waist connector,
12. Waist expansion device,
13. Hip joint block,
14. The back frame.
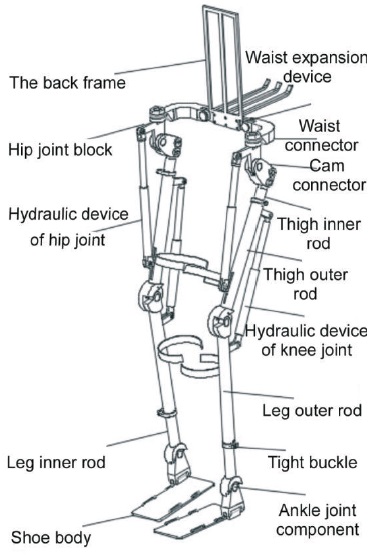
Figure 6. The Overall Structure of the Exoskeleton of the Lower Extremities (Kang et al., 2018)
Hyun et al. (2017) introduced design of a lower-limb, electrically powered exoskeleton called "Human Universal Mobility Assistance (HUMA)''. HUMA has been developed as a research framework aimed at providing the user with weight-bearing assistance for human strength/endurance gain. It has 12 degrees of active/spring passive/free passive freedom to engage human locomotives. HUMA provides mechanical systems for functioning artificial hip and knee joints. The hip actuator is not directly linked to the robot's leg system, but a universal joint is positioned between them to allow the wearer to have free coaxial hip yaw/roll DoF (degrees of freedom). As a result, the hip-actuating torque is only distributed for leg extension and flexion. The knee is the hip-actuating torque that is configured by four barbased polycentric links and powered by an actuator in the middle of the robot's thigh section by the other four barbased power transfer connections, which have a range of potential benefits. (1) human–robot knee alignment during leg motion, (2) the expansion of the zone of voluntary knee stability, (3) the angle-dependent variable knee torque/velocity amplification ratio, and (4) a reduction in the total moment of artificial leg inertia. The ground reaction forces at walking speed is given in Figure 7. The exoskeleton has been evaluated for dynamic gait using an assistive torque determined by a control algorithm carried out over the robot while it kept running at 5 km/h (approximately 1.39 m/s) with/without a load of 20 kg and at 10 km/h (approximately 2.78 m/s).
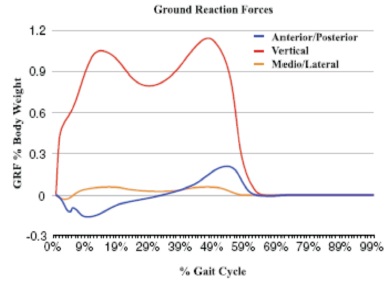
Figure 7. Human Ground Reaction Forces at a Walking Speed of 4.4 km/h (Hyun et al., 2017)
Repeated lower-limb activities in routine manual handling muscles by more than 36 percent, respectively, in all moving activities.
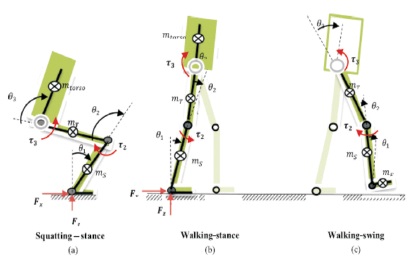
Figure 8. Three DoF Serial-Link Manipulator Configuration for Squatting and Walking Motion on the Sagittal Plane (Sado et al., 2019)
The source of power for most of the exoskeletons implemented is the AC/DC power supply for charging onboard Li-ion or Ni-MH batteries that drive electric motors. Charging may become a major issue when a person relying on exoskeleton mobility has to go outdoors. Singla et al. (2016) formulated a mathematical model to study the capacity of hand-crank devices for charging the exoskeletons and to determine the relationship between the input cranking speed and the output charging power, and also to calculate the cranking time. A flow chart of the power transmission process from human motion required to generate electrical power to charge batteries is shown in Figure 9. It was concluded that human movement action provides a reliable choice to power the exoskeletons.

Figure 9. Open-Loop Block Diagram of Energy Generation/Supply Process (Singla et al., 2016)
Kim et al. (2017) proposed a system design and three locomotion control algorithms for an exoskeletal hydraulic lower extremity to improve stability and reduce muscle exhaustion caused by a backpack load. Locomotion control algorithms for stable usual walking allow dual-mode control and transition control. Dual-mode control consists of two modes: active mode (position phase) and passive mode (swing phase). The exoskeleton is driven in active mode for controlling the activity of the user, and the active joints start operating as passive joints in passive mode by blocking the hydraulic power supply from the hydraulic power system. Transition control includes a torque-shaping process and a pre-transition algorithm, to maximize locomotion responses during gait phase transition. Walking experiments were conducted on a treadmill, at a speed of 4 km/h, whilst carrying a 45 kg load. This study demonstrated the likelihood of reducing leg muscle exhaustion by correlating the EMG signals obtained with and without wearing the exoskeleton in single position and level walking conditions, even while bearing large loads.
Hong et al. (2019) presented a novel three-degree of freedom (DoF) sensorized remote-center-of-motion (RCM) ankle module lower-limb exoskeleton for military purpose. The ankle joint plays an important role among the lowerlimb joints in stabilizing walking motion during the process of the stance. Thus, aligning the center of rotation of ankle module with the ankle center is very critical for reducing a soldier's possible risks and tiredness. The exoskeleton was laid out using two spherical strings. The two spherical chains were modeled to identify the intersection of all revolute pairs, consisting of the spherical chains, close to the rotation center of the ankle of the user. In addition to this, three encoders were attached to each one of the spherical chain's three revolute pairs, to determine the ankle mechanism's three-degrees of freedom orientation. Tests were carried out for three walking conditions between the proposed RCM ankle and the offset rotation center ankle mechanism: level walking, ascending and descending stairs and vertical slope. From the test, it was concluded that the proposed RCM ankle was optimal for detecting the ankle movement and decreasing mechanical interference with the wearer's natural ankle movement compared to the ankle system with an offset center of rotation.
Luo et al. (2019) work proposed the wearable lower limb exoskeleton robot without the help of tools built by the research group, including the lower limb structure exoskeleton design based on human lower limb biomechanical features, control technique development and experimental study to check the function of the lower limb exoskeleton to help the human body stand and walk. The hip joint and knee joint were modeled with a finite block structure which restricts the rotation angle of the motor to ensure the wearer and device safety. The experiments were conducted on two healthy adults to examine the performance of the proposed exoskeleton system. The experiments consisted as follows: (1) wearing lower limb exoskeleton, walked along a 10-metre corridor with crutches; (2) wearing lower limb exoskeleton, walked in a 10-meter-long corridor without crutches. The results showed that the system was feasible.
The exoskeleton did not impact muscle activity or perceived arms effort for the 0 kg load (null load), however it should be anticipated that an increase in the amount of exoskeleton support will resolve this overhead static postures for a long period. This will continue to benefit from further design work aimed at improving usability, especially in terms of comfort and free movement during use.
The machine monitors output torque references statically in the first sets of experiments, which ensures that the movement of the operator is not permitted and the actuator produces the output force in the initial fixed position. For the second range of experiment, the dynamic characteristics of the actuator are checked. If the actuator is able to monitor this reference well, the device has complete clarity and the operator can feel as if they are lifting the load directly instead through a mechanical device. The device demonstrated good output through two sets of experiments involved in the analysis of a sinusoidal reference input and an arbitrary curve. It essentially validated the system design principle and the usefulness of the fuzzy hybrid control technique. Future researches could develop a sufficient number of degrees of freedom in the exoskeleton structure for the entire upper limb, so that the device can be used with intuitive forcefeedback for robot bilateral tele-operation.
Exoskeleton design based on user torque amplification allows synchronous movement of the user with the exoskeleton. Human motion activity provides a reliable alternative for driving mobile exoskeletons. Exoskeleton technology can be used assist military, be it in a war or domestic purpose.
This paper reviews and summarizes the characteristics of domestic and international research cases on exoskeleton robot systems for the wearer's power assistance from the perspective of exoskeleton mechanism, human purpose detection, and regulation of human-robot cooperation. From various research articles, it is deemed that a formal and comprehensive approach is required to be developed in order to allow a more reliable and holistic assessment. Experiments will clearly illustrate the roles and responsibilities of the dismounted combatant. Such advantages will help to ensure further development and promote enhanced international cooperation to better assess the value of a soldier. In order to evaluate the efficiency of the exoskeleton in the military context, it is proposed for a multidisciplinary evaluation using objective and subjective measurement techniques.
Future development will focus on improving performances through the advancement of the exoskeleton and the assessment methods. Considering the continuing advancements in the field of engineering, it is possible that future armed forces will use exoskeletons for modern warfare. Exoskeletons are also currently used in industrial sector. The major benefit of an exoskeleton is used as artificial limbs in medical field. These biomechanical suits can also be used in other areas, such as fire and safety, construction activities, etc. The perception of exoskeletons has progressed well beyond fiction to reality, it is a matter of time that they will become an integral part of civilian life.