(1)

In this paper, the authors study Smarandache TN curves of general helices in the Sol3. Moreover, they characterize Smarandache TN curves of general helices in terms of their curvature and torsion. Finally, they found that the explicit parametric equations.
Mathematics Subject Classifications: 53A04, 53A10.
The Euler- Lagrange equation corresponding to E2 is given by the vanishing of the bitension field
where Jφ is the Jacobi operator of φ. The equation τ2(f) = 0 is called the biharmonic equation [1]. Since Jφ is linear, any harmonic map is biharmonic. Therefore, the authors are interested in proper biharmonic maps, that is non-harmonic biharmonic maps.
In this paper, they study Smarandache TN curves of general helices in the Sol3. They characterize Smarandache TN curves of general helices in terms of their curvature and torsion. Finally, found that the explicit parametric equations.
Sol space, one of Thurston's eight 3-dimensional geometries, can be viewed as R3 provided with Riemannian metric

where (x, y, z) are the standard coordinates in R3.
Note that the Sol metric can also be written as:
where

and the orthonormal basis dual to the 1-forms is

Proposition 2.1. For the covariant derivatives of the Levi-Civita connection of the left-invariant metric gSol3, defined above the following is true:
where the (i, j )-element in the table above equals  ei ej for our basis
ei ej for our basis

Lie brackets can be easily computed as:

The isometry group of Sol3 has dimension 3. The connected component of the identity is generated by the following three families of isometries:
Assume that {T, N, B} be the Frenet frame field along γ [3]. Then, the Frenet frame satisfies the following Frenet--Serret equations:
where κ is the curvature of γ and τ its torsion and


With respect to the orthonormal basis {e1, e2, e3}, we can write



Theorem 3.1. ([2]) Let γ : I → Sol3 be a unit speed non-geodesic general helix. Then, the parametric equations of γ are



where C1, C2, C3, C4, C5, are constants of integration
The obtained parametric equations for Eq.(10) is illustrated in Figure 1.
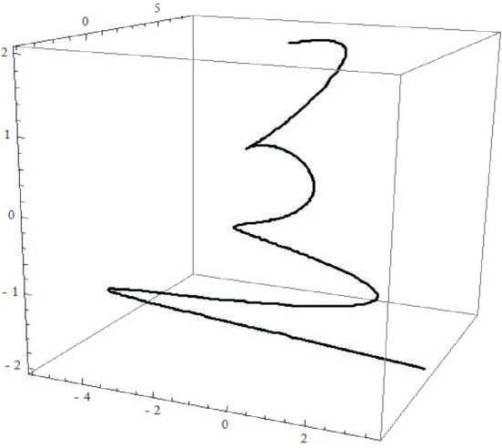
Figure 1. A unit speed non-geodesic general helix
Definition 4.1. Let γ : I → Sol3 be a unit speed B - slant helix in the Sol Space Sol3 and {T, N, B} be its moving Frenet frame. Smarandache TN curves are defined by
Theorem 4.2. Let γ : I → Sol3 be a unit speed non-geodesic general helix in the Sol Space Sol3. Then, the equation of Smarandache TN curves of a unit speed non-geodesic general helix is given by


here C1, C2 are constants of integration.
Proof. Assume that γ be a unit speed non-geodesic general helix.
Using Theorem 3.2, we get

Using first equation of Eq.(3.3), we have

This can be rewritten as
By the use of Frenet formulas and above equation, we get
Substituting (13) and (14) in (11) we have (12), which completes the proof.
In terms of Eqs. (2) and (12), we may give:
Corollary 4.3. Let γ : I → Sol3 be a unit speed non-geodesic general helix in the Sol Space Sol3. Then, the parametric equations of Smarandache TN curves of a unit speed non-geodesic general helix are given by (Figure 2).




where C1, C2 are constants of integration.
Proof. Substituting (2) to (12), we have (15) as desired.
We may use Mathematica in Corollary 4.3, yields
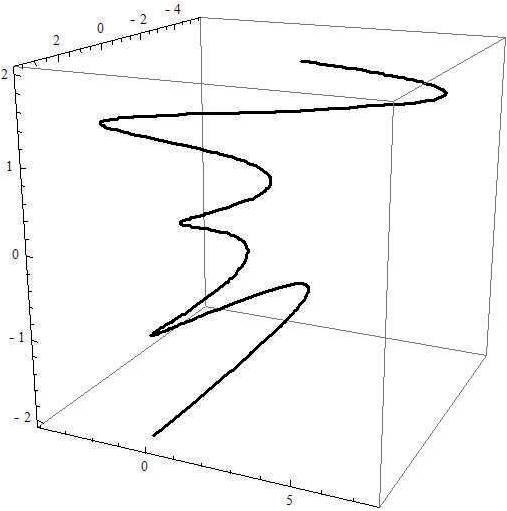
Figure 2. Smarandache TN curves of a unit speed non-geodesic general helix