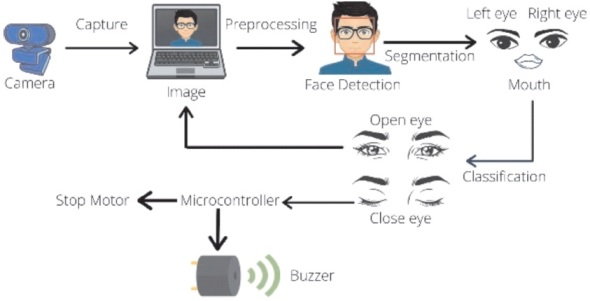
Figure 1. Architecture of the Proposed Drowsiness Detection Model
Traffic on road has increased considerably due to active economy, especially in developing countries. Road accidents have increased with the increasing traffic. Driver fatigue causes around 30% of road accidents. Drowsiness may be caused by restless driving, health issues, extended working hours, etc. Therefore, for road safety, drowsiness of the driver needs to be detected and alerted, and at extreme conditions the vehicle may be parked using assisted parking system. Technology is available through cost effective devices which are simple to be integrated with other systems. This paper proposes a system that uses camera and other devices to achieve the goal. The proposed system will analyze the changes that happen in the face of the driver and process them through a program to detect drowsiness. A prototype will be developed and tested on real time to understand the efficiency of the proposed concept.
A vast majority of people have experienced drowsiness at some point while they were driving their vehicles. Drowsiness is mostly accompanied by lack of mental agility, lethargy and weakness. Most road accidents happen when the drivers experience drowsiness and this needs analysis (Alioua et al., 2014).
Gander et al. (1993) did an analysis on aviation crew members and reported the psychological and physiological effects of sleep disorders which can be used to understand the sleep patterns for computerized studies.
Essential characteristics of the drowsiness among drivers have been used by researchers to determine the drowsiness level (Wang & Shi, 2005). These systems monitor the state of driver drowsiness through a webcam with night vision in a real time environment and when drowsiness is detected, the system sends a warning. The objective of these systems are to improve the safety of people and road safety with the use of automated detection and alarm to avoid accidents caused by driver drowsiness.
In the past few decades, the basic idea of driver drowsiness detection is to monitor passively the condition and behavior of the driver, and then detect drowsiness through advanced data processing and machine learning techniques. Researchers have developed a lot of approaches following this idea, which mainly consists of three types based on selected features: vehicle-based, behavioral, and physiological.
Using vehicle-based signals to monitor driver status is a nonintrusive way, such as steering-wheel activity, lane drifting movement, and gas/brake pedal positions. Drowsy drivers would adjust steering wheel with fewer micro corrections and faster and larger macro corrections. Although steering-wheel movement (SWM) has been used as indicators to monitor drowsy driving in some modern vehicles, it is limited to specific driving settings such as recognized road profiles and vehicle dynamic states (Yang et al., 2019). The standard deviation of the lane positions was also implemented to detect behavioral cues of drowsy driving as fatigued drivers would be more likely to deviate from lanes. However, steering and lane deviation will become erratic in an urban traffic scenario, and the standard deviation will increase even without the onset of fatigue. Moreover, drivers would result in different standard deviations of lateral positions and steering-wheel angle (SWA) even at the same drowsiness level, which blurs the edge between alertness and drowsiness. Therefore, individual driver differences would reduce the reliability of the vehicle-based measures to applications (Hartley et al., 2000).
Drivers' behavioral measures could be such as gaze behavior, eyelid movement, head movement, facial expressions, and mouth movement (Kaplan et al., 2015). They usually use optical sensors (e.g., cameras) to monitor physical changes during drowsiness and can achieve a satisfying recognition performance (Yauri-Machaca et al., 2018). However, the extraction of physical features from videos is still challenging due to the restricted requirement of the light conditions. For instance, detecting facial features could be impacted by the non-uniformity of light sources, asymmetric shades on their face and eye regions, and rapid changes in light intensity caused by shadows of surroundings. To minimize the effect of outdoor conditions, researcher incorporated IR cameras. IR cameras make the detection of pupils easier due to the bright pupil effect; however, IR cameras do not cause a bright pupil under all illumination. In addition, accurate localization of drivers' eye in the frame is difficult due to the high degree of variability of the appearance of eyes (e.g., facial expression variations, occlusion, pose, and lighting). Moreover, some other limitations still exist infeasibility of the visual features; for example, some drivers could fall asleep with eyes open and wearing sunglasses while driving would make the eye activity features unavailable. Therefore, behavioral measures are insufficient to detection driver drowsiness (Vargas-Cuentas & Roman-Gonzalez, 2017).
Using physiological measures to monitor drowsy driving is reliable, for example, electroencephalography (EEG) for unveiling brain activity, electrooculography (EOG) for monitoring blink behavior, and electrocardiography (ECG) for measuring heart rate or heart rate variability (HRV). The EEG signal is the most reliable non-invasive solutions because of its high temporal resolution, which can be obtained without mediation by subjective response or transformation through (secondar y) performance manifestation. However, most of the EEG researches associated with drowsiness has only been done in controlled laboratory conditions without considering the portability, convenience, long-term wearing comfort, and environmental noise. Compared to EEG, EOG is more robust to noise as it contains recognizable amplitude. The EOG is usually used to characterize driver drowsiness by quantifying the driver's blink duration or eyelid opening/ closing rate (Chieh et al., 2005). However, this is a kind of electrical signal measured on the skin around the eyes and would be difficult to measure with a wearable device while driving.
For ECG, drivers' heart rate, heart rate variability (HRV), and breathing rate are the preferred measures. When falling asleep, the parasympathetic influence will slow down the heart rate, allowing ECG signals to capture drowsiness characteristics. However, many factors such as emotional stability and tension would make the ECG signals more complex and inapplicable (Triyanti & Iridiastadi, 2017).
In summary, these three measures could detect driver drowsiness by passively monitoring driver states, but they still are vulnerable to the uncertainties of real driving environment and individual differences.
This paper presents an active detection approach towards enabling vehicles to purposefully exploit its actions to identify drowsy driving by judging whether the driver makes an appropriate response.
The objective of this work is to develop a system that allows detects whether the driver is feeling drowsy when the vehicle is running. Figure 1 shows the architecture of the proposed Drowsiness Detection Model. We use this model to detect drowsiness of the driver driving a vehicle by processing the images that are obtained using the camera.
Figure 1. Architecture of the Proposed Drowsiness Detection Model
A camera is used to acquire the image of the driver. An adjustment is made in the center of the camera to capture legible images, so as to use built-in camera light or infrared mode, depending on the darkness of the place without disturbing the driver. In this stage we connect the camera with the MATLAB software, so it gives a instruction called "imaqhwinfo". This instruction is to know the name of the camera in the software, which in this case, is called "Win Video". And, finally, the "imaqhwinfo ('Win Video', 1)", the instruction is executed to check the the connected camera, as well as the resolution. For capturing the images, two environments are chosen: the first is considered in the day and the second in the night. The drivers face is focused in image acquisition. In the software, an algorithm is developed generating a frame with a rectangle to the eyes and the mouth. This process is done to produce the detection of the patterns of drowsiness.
The next step is analyzing the obtained image in MATLAB. The image obtained by the image is transformed into a 2- dimensional matrix. Each element corresponds to a pixel of the image. The image is then modified to be able to achieve an improvement in the image by applying various filters and removing noise.
The next step is processing the image to isolate the regions of interest. Now, the process of extracting characteristics begins, which analyses the moment and distance of the eyes opening and closing (as given in Figure 2)
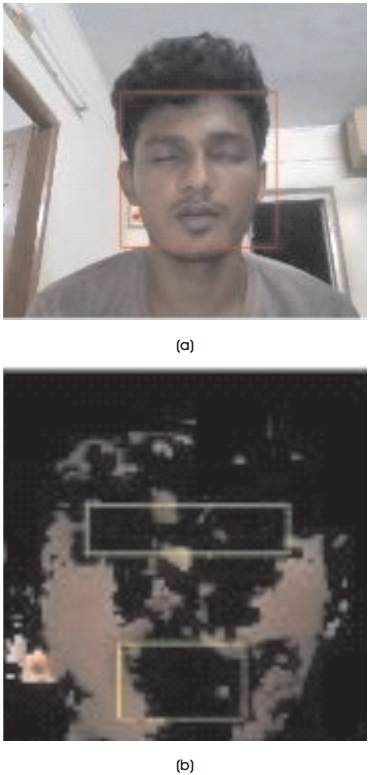
Figure 2. Characteristics Extraction of Captured Image (a) Input Image, (b) Processing the Image
The identified regions of interest are the left eye, the right eye and the mouth Figure 3. These are analyzed for their characteristics of whether they are open or closed.
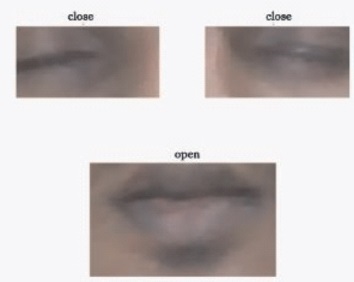
Figure 3. Classification of the Area of Analysis
After the detection, the system will alert the driver with an alarm to to regain the consciousness of the driver. The alarm has varied frequency and amplitude so that the driver is not getting used to the alarm and potentially ignore it.
Automatic breaking and parking would be considered as an advanced option when the driver is not responding to the alarm. Ultrasonic sensor senses the intrusion in the travel path and gives the signal to the microcontroller (Parande et al., 2017). It acts as the eyes of the control unit. The HC-SR04 Ultrasonic Sensor is a very affordable distance sensor that has been used for avoiding object in various robotics projects. It essentially gives the Arduino eyes/special awareness. It consists of two connecting terminals T and R, where T represents waves transmission and R represents receiving the waves. This is used to avoid obstacles and safely park the car at the closest possible location (Ram & Kumar, 2017).
The detection of drowsiness and automatically parking the car introduces a more practical approach to drowsiness detectors. The success rate of the system will be studied as future scope after implementing the prototype on real time driving environment and using the information obtained from the drowsiness detection system. The proposed system is a better way to protect the driver, the passengers and other vehicles on the road.