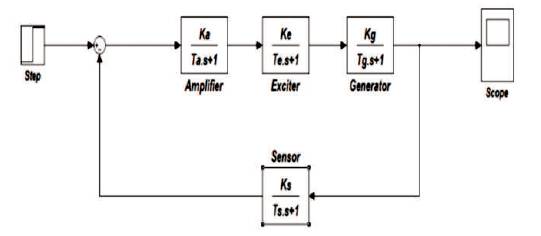
Figure 1. AVR System Model
This paper presents a survey on optimization techniques used to tune the controller parameters on Automatic Voltage Regulator (AVR) system. AVR is a device used to adjust the terminal voltage of synchronous generator. Since output voltage has slow response and instability, a Controller is used to improve stability and to get better response by minimizing maximum overshoot, reducing rise time, reducing settling time and improving steady state error. Proportional-Integral- Derivative (PID), Fraction Order PID (FOPID) and fuzzy logic are some examples of controllers which are used. Optimization techniques are used to tune the Controller due to nonlinear loads, time delays, variable operating points and others. There are different types of optimization techniques as Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Artificial Bee Colony (ABC), Harmony Search Algorithm (HSA), Local Unimodal Sampling (LUS), Teaching Learned Based Optimization (TLBO), and others. Researches are performed on different optimization techniques to improve terminal voltage response and stability.
The Automatic Voltage Regulator (AVR) is a device that adjusts or regulates the output voltage within the nominal voltage of synchronous generator under different loading conditions. It controls the value of excitation current in the exciter (which controls magnetic field and induced EMF) to keep terminal voltage at nominal voltage (Ula and Hasan, 1992).
An AVR system comprises four main components: Amplifier, Exciter, Generator, and Sensor. These components will be linearized (ignore saturation and nonlinearity) using four transfer function for mathematical modeling as shown in Figure 1 (Ula and Hasan, 1992).
Figure 1. AVR System Model
The output voltage of this model is the terminal voltage of synchronous generator which is as shown in the following Figure 2. It shows instability and slow response due to high alternator field windings inductance and load variation.
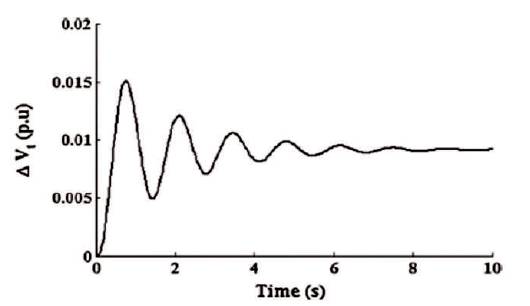
Figure 2. Output Voltage without Controller
A controller is used to get better stability and better response by minimizing the maximum percentage overshoot (Mp), Rise Time (Tr), Settling Time (Ts), and Steady State Error (Ess).
There are different types of controllers as:
Optimization techniques are used to tune the controller parameters due to high order, time delays, nonlinear loads, variable operating points, and others. It is also used to have better transient response, root locus, bode, and statistically Receiver Operating Characteristic (ROC) analyses.
There are different types of optimization techniques as: Genetic Algorithm (GA), Current Search (CS), Tabu Search (TS), Particle Swarm Optimization (PSO), Artificial Bee Colony (ABC), Harmony Search Algorithm (HSA), Local Unimodal Sampling (LUS), Teaching Learned Based Optimization (TLBO), and others.
A different objective function is used in researches to get better performance and minimize the error as Integrated Absolute Error (IAE), Integrated Square Error (ISE), Integrated of Time weighted Absolute Error (ITAE), and Integrated of Time weighted Square Error (ITSE).
Figure 3 shows AVR model using optimization and a controller. The terminal voltage of a synchronous generator is improved and has better dynamic response as shown in Figure 4.
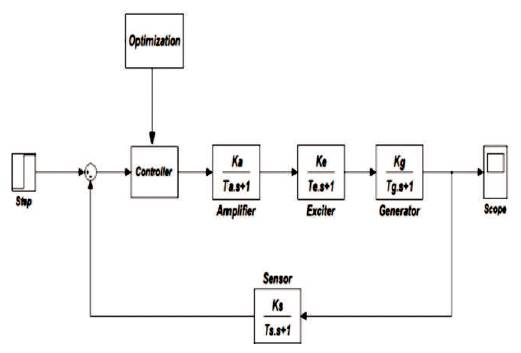
Figure 3. AVR Model with Controller
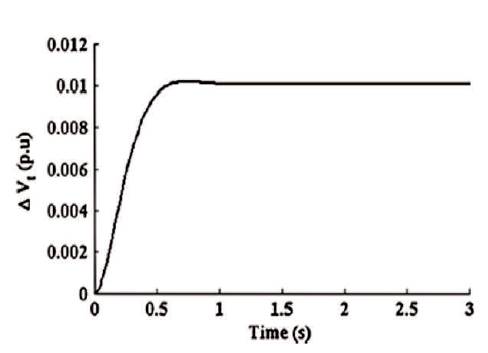
Figure 4. Output Voltage with Controller
This survey shows different types of optimization techniques used to tune the controller parameters on AVR system. Different researches are performed on each type and are compared with other techniques to show a better terminal voltage response.
GA was first proposed by Holland (1975). Its concept depends on the initializing number of individuals (group of individuals called Population). Current population will reproduce using probabilistic methods (as rank or Roulette Wheel selection), crossover and mutation to produce a new generation with better individuals. It is iterated till fitness function is reached and best generation is selected (Goldberg, 1989).
Bhati and Nitnawwre (2012), and Divya and Seshadri (2015) designed an AVR system model using GA optimization to tune PID controller. They concluded that the system has better response and stability than using AVR without a controller.
It is an iterative search which starts from initial point to reach the best solution. It has two main components which are Tabu List (TL) and Aspiration Criterion (AC). Tabu List (TL) is to avoid repeating local optimum in the process. It has also Back tracking process that search new optimum solutions in different directions encountering Backtracking Criterion (BC) (Chaiyaratana and Zalzala, 1997; Puangdownreong et al., 2002, 2004).
Anant and Padej (2008) wrote a paper using Tabu search (TS) algorithm in the AVR system using PID controller and showed that it has better performance than Ziegler and Nichols method. IAE, ISE, and ITAE were used as objective functions.
Sujitjorn et al. (2006) designed AVR system using Multipath Adaptive Tabu Search (MATS) to tune the PID controller. He compared his technique with Adaptive Tabu Search (ATS) (Puangdownreong et al., 2012) and TS and concluded that MATS has better performance than ATS and TS using PID controller (Puangdownreong, 2015).
It is single solution based and from the latest metaheuristics made in 2012. It is initialized by search space (current direction boundary), the number of initial solutions (current directions), and a number of neighborhood members (sub direction of selected current direction), search radius (sub-search space of selected current direction), and maximum allowable solution cycle (entrapment of selected current direction).
The objective function will arrange (rank) the current directions. The best current direction is selected and gets the best optimized solution from this current direction within the search radius and maximum allowable solution cycle. It is iterated until optimum solution is met or a termination criterion is reached (Sakulin and Puangdownreong, 2012).
Puangdownreong (2012) calculated and showed that CS using PIDA controller in AVR system has better performance and response than GA and TS.
Nawikavatan et al. (2014) concluded that Intensified Current Search (ICS) using a PID controller in the AVR system has better efficiency and performance and easier implementation than original CS using PID controller. Mossad et al. (2016) proved the superiority of the PIDA controller than the classical PID in enhancing the AVR performance. They used Teaching Learned Based Optimization (TLBO), Harmony Search Algorithm (HSA), and Local Unimodal Sampling (LUS) to tune the controllers' parameters.
It is based on micro bat echolocation behavior (Yang, 2010). Bats are mammals capable of detecting prey distance, background obstacle and food places using echolocation behavior (Sambariya et al., 2016). They fly randomly with velocity, but with varying wavelength (Frequency), pulse rate and echo loudness according to the distance of prey or food location (Fister et al., 2014).
It begins with number of bats (Population) move with random velocity and in random position. Each bat must have pulse rate, loudness, and pulse frequency range. Each bat updates its velocity (it depends on pulse frequency and position) using an iteration method. Then the new position updated depends on loudness where loudness decreases and pulse rate increases as bat find their prey or food location. It is iterated till maximum iteration is reached and best position is selected with best fitness function.
Madasamy and Ravichandran (2015) proposed an AVR model using a BAT algorithm to tune the PID controller and concluded that it has better performance than PSO and Ziegler Nichols [26].
Sambariya and Paliwal, (2016) designed an AVR model using PIDA controller, which is optimized by BAT algorithm. This optimization was compared with GA, TS, and CS using the same controller PIDA. It showed that BAT algorithm has better performance in output voltage using the three objective functions (ISE, IAE, and ITAE).
It is based on bird flock or fish school which was introduced by Kennedy and Eberhart (1995). It is started by moving particles (population) in random directions with random velocity. The velocity of each particle is updated by iteration method. Particle velocity depends on the weight factor (Shi and Eberhart, 1998), best position of particle and global best position of all particles. The position of particle is also updated. Particle's position depends on the last particle's position and its new velocity. Velocity and position of each particle will be updated till maximum number of iteration reached and global best position is selected which is the optimum solution.
Gaing (2004) performed on Particle Swarm Optimization (PSO) with PID controller in AVR system. It showed better performance and response than GA with PID controller.
Zamani (2009) performed PSO by using FOPID in AVR system which shows better performance of FOPID than PID controller.
Sambariya and Nath (2015) performed calculations on a single area and two area models of power system with AVR and AGC loops using a fuzzy logic controller and PSO-PID controller.
Li et al. (2017) showed that using Fractional Order PID (FOPID) has better performance than PID controller using the reference model with IAE objective function. This method was compared with the RGA, DE, and CRPSO algorithms and showed that PSO-RM-FOPID has better performance than the others.
It is the same as Particle Swarm Optimization, but it changes the updated velocity due to different factors. These factors cause balance between local and global search, balance social and personal experiences and takes care of diversity in direction and change in velocity direction (Ho et al., 2005).
Mukherjee and Ghoshal (2007) performed Craziness based on Particle Swarm Optimization (CRPSO) using the sugeno fuzzy PID controller in AVR system. It showed better performance and more robust than GA. This paper also shows that CRPSO is better in performance than PSO-PID controller and Hybrid Taguchi Particle Swarm Optimization.
It is the same as Particle swarm Optimization, but it checks particle's velocity boundaries without checking position boundaries. If the fittest position of current iteration is better than the next iteration, the velocity will not be updated (Liu et al., 2004).
Chatterjee et al. (2009) used VRPSO and CRPSO to tune the sugeno fuzzy PID controller in AVR system. These techniques showed better performance and response than PSO and GA. This paper showed also that VRPSO performs better than CRPSO.
It is a Continuous Probability Density Function (CPDF). It is associated with each design variable. Optimal value is reached using iteration method by modifying CPDFs (Howell and Best, 2000; Howell and Gordon, 2000; 2001).
Kashki et al. (2008) showed that RLA in AVR system using a PID controller has better performance and response than PSO and GA using PID controller.
Kashki et al. (2009) proposed a method called continuous action and combinatorial discrete of RLA and optimized it in AVR system model to tune PID controller. They concluded that using this method has faster response in terminal voltage than using PSO and Ziegler-Nichols uses PID controller.
The Taguchi method is based on an orthogonal array that minimizes design experiments number with the same design variables and levels. The mean value of results (ANOM) determines the optimum values of design variables. Variance of results (ANOA) selects the best two design variables. Multi objective GA obtains the accurate optimum values of the two selected design variables (Hwang et al., 2008).
Hasanien (2013) shows better performance of Taguchi Combined Genetic Algorithm (TCGA) than PSO and GA using a PID controller.
It is meta-heuristic algorithm. Its main idea is to find the best path (feasible solution) for the ants to move to find a food source. The best path is selected from a number of ants (population) move in random direction and one ant finds the best path and the other ants follow the path (Colorni et al., 1992).
Babu and Dinesh (2015) used ACO and GA in AVR system using FPID controller and concluded that the ACO has better response and performance than GA.
Soundarrajan et al. (2010) used ACO in AVR system using PID controller and concluded that it has better performance that PSO and GA using a PID controller.
Coelho (2009) concluded that chaotic optimization algorithms showed better output voltage performance in the AVR system using a PID controller based on the lozi map that increases the convergence rate and its resulting precision. This optimization technique is robust and has short execution time.
Pan and Das (2013) published a paper that the nondominated sorted GA and chaotic Henon map is used as a multi objective optimization in AVR system. This paper concluded that using FPID controller has better performance than using PID controller. It calculated the variation of exciter gain (K ) in both controllers and studied E this variation on the output voltage response. It also compared between tradeoff design using a different chaotic map and without a chaotic map.
Li et al. (2006) used Chaotic Ant Swarm Algorithm (CAS). This algorithm is based on chaotic optimization and Ant swarm optimization. Zhu et al. (2009) designed an AVR system using CAS to tune PID controller. It was compared with GA and concluded that CAS has better response than GA using PID controller.
Tang et al. (2012) used CAS optimization in the AVR system using FPID controller and a PID controller and concluded that FPID has better response than PID controller. CAS is also compared with PSO and GA and concluded that CAS has better performance and faster dynamic response in terminal voltage.
ASO is a group of adventurous and fickle individuals. They improve their situation anarchically. They explore complete solution space till they find a global optimal solution. This algorithm is flexible and robust to solve multi objective problems as non-linearity and non-differentiability (Ahmadi- Javid, 2011).
Shayeghi and Dadashpour (2012) concluded that Anarchic Society Optimization (A SO) has better performance than VRPSO and CRPSO using PID Controller, which means lower maximum overshoot, lower settling time, and faster response in the AVR system.
This algorithm depends on the concept of searching food source. It has three bee groups called employed, onlookers, and scouts. Employed bees and onlookers are sent to search for food source (possible solution) and calculate the nectar amount (solution quality). Scouts are sent to discover new food sources. Best food source is selected each cycle until the requirement is met (Karaboga, 2005; Karaboga and Basturk, 2007).
Gozde et al. (2010) used ABC optimization technique in AVR system to tune PID controller and showed better performance than PSO using PID controller.
Gozde and Taplamacioglu (2011) had published a paper that showed better performance and tuning, capacity of the Artificial Bee Colony (ABC) optimization than PSO and Differential Evolution algorithm (DE) using a PID controller in the AVR system.
GSA is based on mass interactions and Gravity and motion Newton's Law. It is initialized by the number of particles (population). Particles are placed in different positions with different masses. These particles move with random velocities. These velocities depend on their acceleration (acceleration for each particle is calculated by dividing random force by its mass). Particles' velocity and their position are updated using an iteration method till they reach their best positions. The best solution is selected from the best particle's position (Rashedi et al., 2009).
Li et al. (2014) proposed a method using Piecewise function of GSA to tune PID controller in AVR system. This technique showed better performance than original GSA and PSO uses PID controller.
Duman et al. (2016) concluded that GSA using a PID controller in the AVR system has better performance, lower maximum overshoot, lower settling time, and rise time than ABC, PSO, and DE algorithm.
It is also called Simplified Particle Swarm Optimization. It is the same concept and steps as PSO, but its particle velocity does not depend on particle best position. Particle velocity depends only on weight, inertia, and global best position. Particle velocity and position are updated using an iteration method till best positions are reached and global best position is chosen as an optimum value (Pedersen and Chipperfield, 2010).
Panda et al. (2012) prepared the design of PID controller in AVR using Simplified Particle Swarm Optimization, which is also called Many Optimizing Liaisons (MOL) algorithm. This paper compared between MOL, ABC, PSO, and DE algorithms and showed that MOL has the best performance on the AVR system.
It is similar to PSO, but the inertia weight, which is a function of updates velocity is varied dynamically using adjacency index. It performs better global and local exploration (Alfi and Modares, 2011).
Nirmal and Auxillia used APSO in AVR system to tune the PID controller. This optimization showed better performance and response than MOL and PSO (Nirmal and Auxillia, 2013).
This optimization technique takes the best fitness position from random position particle which decreases its sampling range with the new position of the particle using iteration method. This optimization technique overcomes the problem of using a fixed sampling range as it is used in Simulated Annealing (SA) and Hill Climber (HC) algorithm (Pedersen and Chipperfield, 2008).
Mohanty et al. (2012) published a paper that compared LUS with ABC optimization in the AVR system using PID controller. Four objective functions were used: ITSE, ITAE, IAE, and ISE. It was concluded that LUS using ITAE has the lowest maximum overshoot and the lowest settling time compared to ABC and other objective functions. It was also concluded that LUS using ISE has the low rise time and the lowest peak time.
Mohanty et al. (2014) applied LUS optimization technique on the AVR system using PID controller. Four objective functions were used ITSE, ITAE, IAE, and ISE. LUS using ISE had the lowest maximum overshoot and settling time compared to the other objective functions and compared also to ABC, PSO, and DE algorithm. LUS using ITSE had the lowest rise time and lowest peak time compared to all previous. This paper also examined varying time constant of AVR from -50% to +50%, which causes variation in the performance of the AVR system.
It is developed by Geem et al. (2001). It is based on a musician who is trying to improve his instrument pitches in order to find best harmony state (best solution) (Yadav et al., 2012). It depends on Harmony Memory Size (HMS) and Harmony Memory Consideration Rate (HMCR).
It is initialized by setting design variable X where “n” is a n number of design variable, HMS which is the population, HMCR (ranges from 0 to 1), pitch adjustment rate (ranges from 0 to 1), step size, and maximum number of iterations. For each iteration, New Harmony vector x is formed because of random selection, adjustment of pitch, and memory consideration to improve harmony till maximum iteration and optimum solution reached (Fourie et al., 2010).
Bendjeghaba and Boushaki (2013) concluded that improved HSA has better performance than PSO using a PID controller in AVR system. ITAE was used as the objective function.
Sambariya and Paliwal (2016) concluded that HSA has better performance and faster response than GA, TS, and CS using PIDA controller in the AVR system.
It is based on the concept of classroom environment, where knowledge is passed on from one individual to the other by teacher phase and learner phase. Teacher phase is that teacher (best learner) imparts knowledge to learners and makes efforts to increase mean class result. Learner phase is that learners interact to gain knowledge among them. Teacher phase gets best solution for each learner result. Learner phase increases learner results from interaction and comparison between learners results to take the best result (optimum value). The design variables are the number of subjects (Rao et al., 2011, 2012).
Priyambada et al. (2014) designed an AVR system using a PID controller optimized by TLBO. ITAE was used as the objective function. The response was studied by changing the time constant of AVR system -50% and +50%.
Priyambada et al. (2015) changed their controller to Fuzzy PID controller using TLBO with the same objective function (ITAE). It was concluded that TLBO using fuzzy PID Controller is better in performance than PSO and Firefly Algorithm (FA). The response was studied by changing the time constant of the AVR system (TA, TE, TG, and TS) with ranges -50%, -25%, 25%, and 50%.
Chatterjee and Mukherjee (2016) wrote a paper on the AVR system being optimized by TLBO using a sugeno fuzzy PID controller. It was concluded that TLBO using PID controller is better in performance than LUS, MOL, ABC, GA, and DE. The response was studied by changing the gain of generator from 0.7 to 1 and changing the time constant TG from 1 to 2 in step of 0.2. The response was studied by changing time constant of the AVR system (TA, TE, TG, and TS ) with ranges - 50%, -25%, 25%, and 50%, respectively.
This section shows hybrid connection between two optimization techniques.
This optimization contains hybrid connection between GA and PSO (Juang, 2004).
Kim and Park (2005) used HGAPSO to tune the PID controller on AVR system and showed better performance and response than PSO and GA.
Shayeghi et al. (2015) wrote a paper using HGAPSO on AVR system to tune FP+FI+FD controller. This paper concluded that FP+PI+PD controller has better performance and response than a fuzzy PID controller and conventional PID controller.
It is a hybrid connection between Genetic Algorithm (GA) and Bacterial Foraging (BF). Bacterial Foraging includes four stages which are Chemotaxis, Swarming, reproduction, and Dispersal (Passino, 2001).
Kim and Cho (2005, 2006) wrote two papers and proposed HGABF using a PID controller in AVR system. These papers showed better response of HGABF than HGAPSO, PSO, and GA.
This optimization algorithm shows the connection between PSO and GSA optimization techniques. This begins with number of population particles in different positions with different masses. Particle's Velocity depends on acceleration (it is taken from GSA) and its weighting inertia and global best position (it is taken from PSO). Particle velocity and position are updated using an iteration method till best position is reached in all particles and global best position is selected from these particles (Mirjalili and Hashim, 2010).
Kansit and Assawinchaichote (2016) presented a paper that showed better performance of PSOGSA than ZN, PSO, and MOL algorithms using ITAE objective function of PID controller in the AVR system.
As Sultan (2017) mentioned, Kansit and Assawinchaichote (2016) applied the PSO-GSA hybrid method to tune PID controllers for enhancing AVR performance (Sultan, 2017; Kansit and Assawinchaichote, 2016).
Table 1 explained the comparison between several optimization techniques and advantages and disadvantages of each of them as explained in (Basir and Ahmad , 2014; Selvi and Umarani, 2010; Anand and Dalal, 2014; Rajasekhar et al., 2012; Zhang et al., 2012).
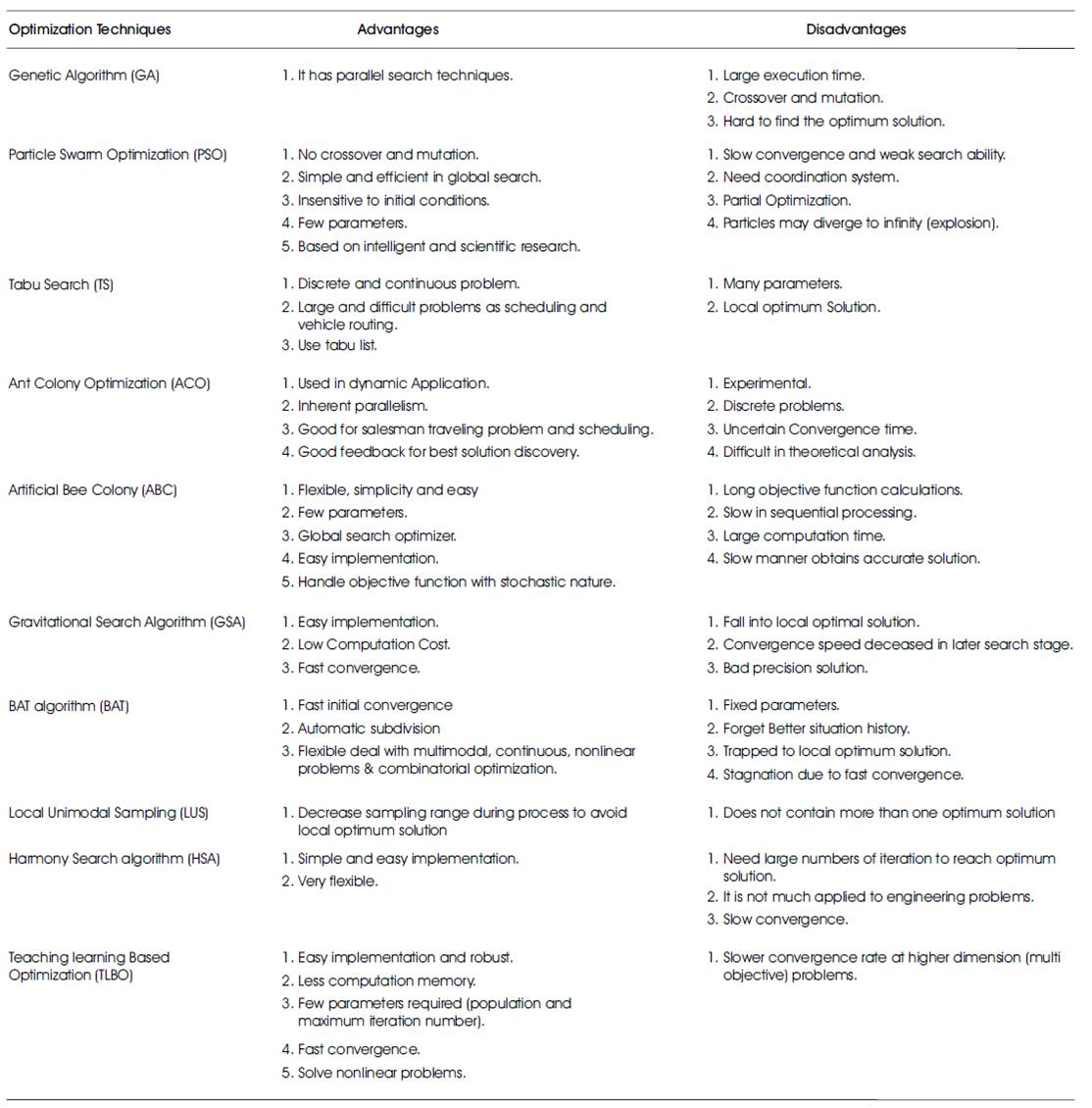
Table 1. Comparison between Optimization Techniques
This survey shows different optimization techniques to enhance the AVR performance through tuning the controller parameters. Most of researches does not consider the analysis of performance using Root locus and Bode diagram, which are accurate presentation to the system. Also there are several new optimization techniques not used in AVR application in most of literatures such as Whale optimization technique. Finally several new controllers are not used in most of literatures such as Proportional-Integral-Derivative-Acceleration (PIDA) controller.
This survey shows different optimization techniques that improve the terminal voltage dynamic response in the AVR system of synchronous generator. Optimization techniques are used to tune the controller parameters and improve the response by minimizing maximum overshoot, reducing rise time, reducing settling time, and improving steady state error. Researches' comparison between different optimization techniques and also between different types of controllers to get better response in order to enhance the performance of AVR system are presented in this survey. It is noticed that the most used controller in the previous works is PID, but there are other controllers that have better response as FOPID, PIDA, and Fuzzy logic. It is also cleared that the most used optimization is PSO and modification versions of PSO, such as MOL, VRPSO, and APSO even with TLBO gives better results than PSO as shown in the previous sections.