
Figure 1. Experimental Hypersonic vehicle model with 34 degrees of sweep back

Figure 2. Experimental Hypersonic vehicle model with 66 degrees of sweep back
Experimental Testing
Wind tunnel description
The wind tunnel is of 20m long tunnel and has a rectangular test section dimensions of 0.9m* 1.22m* 1.82m with a maximum speed of 89 m/s used for the experimental study is shown in Figure 4. The test section speed can be controlled by the motor with microprocessor based electronic speed control unit whose least count is 1 rpm. The tunnel is equipped with Sixcomponent strain gauge internal balance for the force measurement. The hypersonic model is fitted with Sixcomponent strain gauge internal balance and the support of the balance is fixed with the ground to avoid fluctuations due to the tunnel vibration. The outputs from strain gauges internal balance are connected to the data acquisition system with a computer interface. The strains developed on the model are realized as voltage and are converted into forces by means of standard correction factor. A careful calibration of the six component internal strain gauge balance was performed before the start of the experimental program.
Experimental Setup
The model attached with the six component strain gauge internal balance by means of metal frame shown in Figure 3.

Figure 3. Strain gauge internal balance mounted in the model

Figure 4. The Low speed wind Tunnel
Then model with the strain gauge balance mounted in the AOA change plate. The AOA change plate is mounted in the test section in such a way that they will not touch the body of the test section. And it is fixed in the tunnel to avoid vibration.The connections from the six component strain gauge balance is taken out and connected in the Data Acquisition System. The DAS has been connected to the Computer.By using the Catman 4.5 Express software the datas from the model is collected.
The AOA of the models has been changed for every test.The data collected from the balance for five speeds 9, 13, 24, 35, 43 m/s respectively. The aerodynamic forces acting on the model was measured at different angles of attack from +15 degree to -15 degree insteps of 5 degrees.
Results and Discussion
The various results obtained from the experimental analysis over the configurations shows that the body with Wing I performs well in the low speeds. According to the design body with wing I should fly at low speeds. The Figures 5-9 shows the CL Vs AOA curve in which the maximum CL obtained at 15 degree AOA. Also the CL is positive at zero AOA. Figures 10-14 shows that there is considerable drag coefficient for the configurations because of blunt nose, wing attachment etc. The L/D Vs AOA shown in the Figures14-18 gives the maximum aerodynamic efficiency occurs at 10 degree AOA.
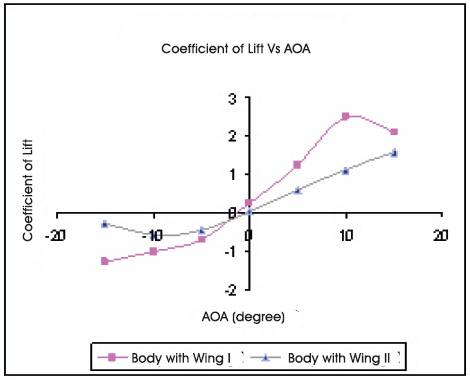
Figure 5. Variation of CL Vs AOA at 9 m/s
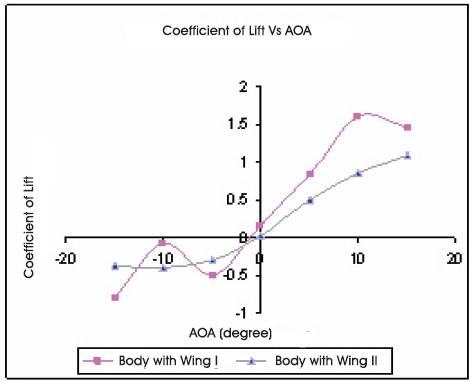
Figure 6. Variation of CL Vs AOA at 13 m/s
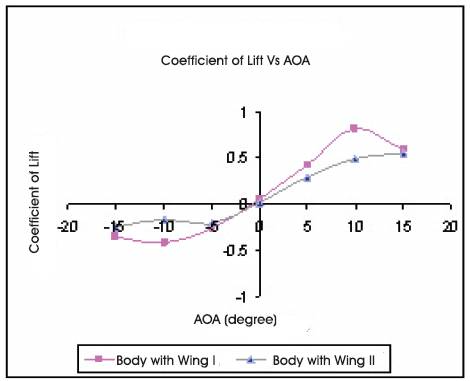
Figure 7. Variation of CL Vs AOA at 24 m/s

Figure 8. Variation of CL Vs AOA at 35 m/s
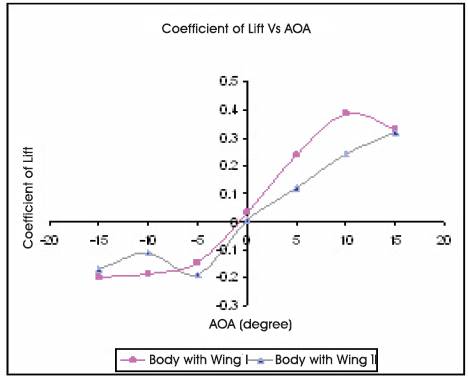
Figure 9. Variation of CL Vs AOA at 43 m/s
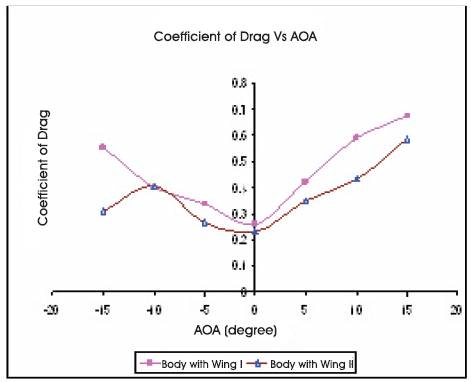
Figure 10. Variation of CD Vs AOA at 9 m/s
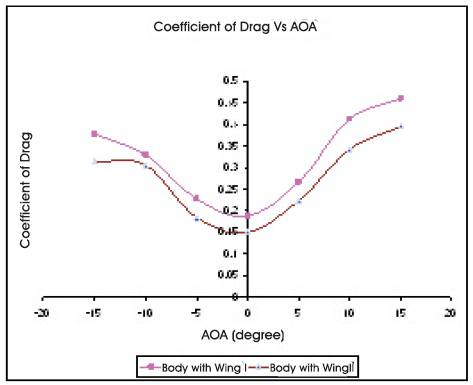
Figure11. Variation of CD Vs AOA at 13 m/s
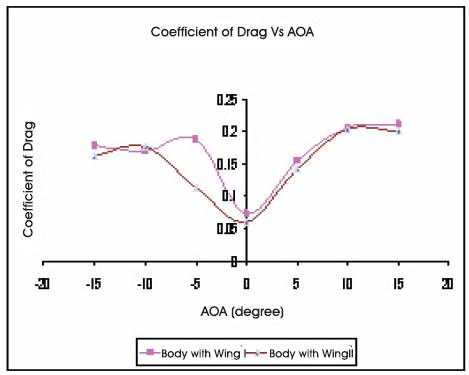
Figure 12. Variation of CD Vs AOA at 24 m/s
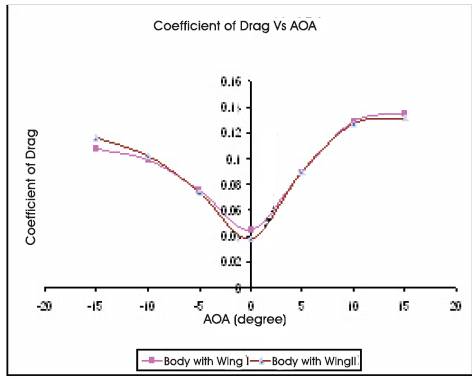
Figure 13. Variation of CD Vs AOA at 35 m/s
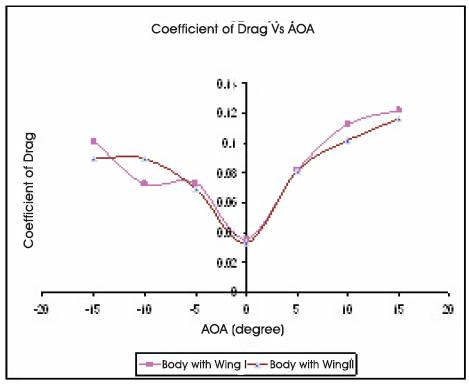
Figure14. Variation of CD Vs AOA at 43 m/s
The body with wing II shows that the stalling occurs late for this type of delta wing aircrafts. This type of configuration having low aspect ratio. But the CD Vs AOA shows that the drag is less for the body with wing II configuration. So this type of vehicle could perform well in the high speeds with less drag. The L/D ratio is maximum at the 10 degree AOA as shown in Figures15 -19. From these results the designed vehicle could perform from low speed to high speed by the concepts of curved forebody and variable sweepback wing.
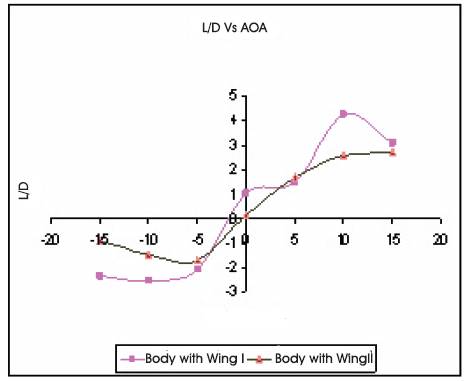
Figure.15 Variation of L/D Vs AOA at 9 m/s
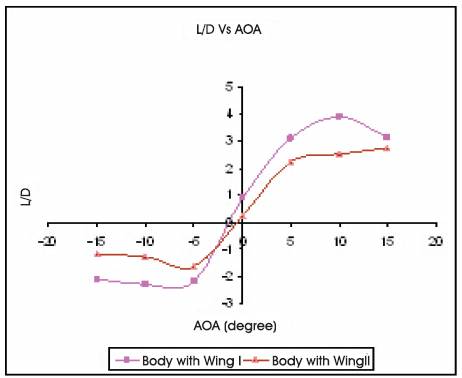
Figure16. Variation of L/D Vs AOA at 13 m/s
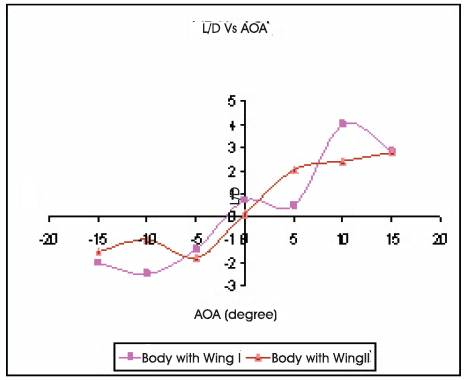
Figure 17. Variation of L/D Vs AOA at 24 m/s
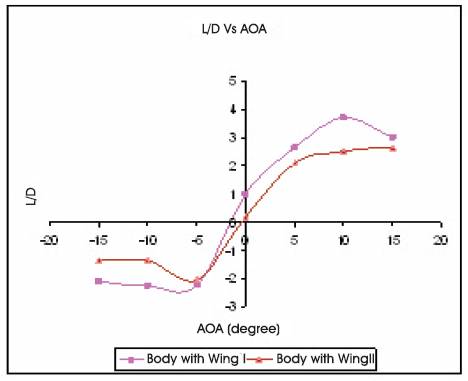
Figure 18. Variation of L/D Vs AOA at 35 m/s
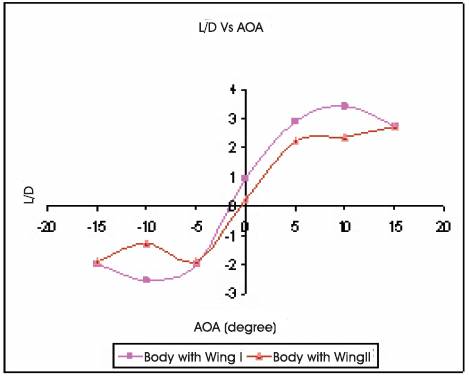
Figure 19. Variation of L/D Vs AOA at 43 m/s
In this study, the desired configuration vehicle with this design will be taking off from the ground using the sweep back angle of 34 degree and it will increase its sweep back angle to fly at higher Mach number. The vehicle with blunt nose configuration will produces more drag at low speeds. The L/D ratio of the vehicle is maximum for the sweep back angle of 34 degree. This is suitable for low speeds and the same configuration is not suitable for the high speeds. The continuous change in sweep back angle will help to improve the performance of the vehicle at high speeds.