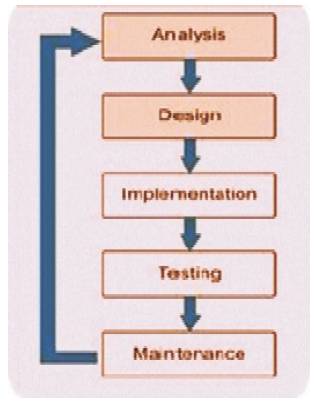
Figure 1. Study & Process Flow
This paper elaborates the model of humanoid robot which interacts with human being and performs various operations as per the commands given by the human being. A humanoid robot having Synthetic Brain can able to do Interaction, Communication, Object Detection, Information Acquisition about any object, respond to voice commands and chats logically with human beings. For the purpose of reducing the noise of voice commands, an audio filter is used to improve the voice commands’ clarity for the robot to work appropriately. Image processing concept is used for object detection and to make the system intelligent. That is whenever the system interact, communicates or chats with human, it gives proper response, question / answers due to the integration of artificial intelligence and DFA / NFA automata.
Synthetic Brain is an emerging technology. Synthetic Brain is nothing but an artificial brain and its working mechanism is just like human brain [1]. That is, this technology has large scope in computer science and engineering. It can be used to develop the artificial brain of the robot as well as the auto-respond software.
Synthetic Brain is a respond engine which responds to various events that occurs in real-time. Same as conversation with people while performing multiple-tasks if is a critical thing, and also maintaining large dynamic database for acquisition of information about any object like fruits, books, etc. Synthetic Brain in robot is designed to discuss with people as per their mood and topics. i.e. by reading variations of voice frequencies. Whenever an object is given to a robot to identify, that is, its eyes camera robot gets the picture in frame format, it analyzes and gives a brief information about the object. For example, if like if robot scans the book as an object and if any information of that book is already available in the database, then it shows. Otherwise, it acquires data from the internet and shows brief information on the display device i.e. screen or project the data if projector is interfaced, as Author, type of book, subject, contains, index, references, etc. Robot will also be able to perform some tasks like finding the forgotten things, keys etc.
There are boundless scopes for Synthetic Brain to make automated machines, which are able to take decision on any real-time events that have occurred. For example, whenever the robot makes conversation with the human, there will be multiple way to respond. For this purpose, robot uses DFA/NFA combinations of alphabets to responds. For designing and implementation of humanoid robot with synthetic brain, four basic technologies are integrated Robotics, Image Processing, Artificial Intelligence and Audio Filtering[2],[3].
Robotics is used for the modeling purpose of the robots in which it includes the motion technique. And hardware is implemented with respect to the technology used in the robot. Image Processing is the technique of performing various operations on the images for acquiring the knowledge and for object detection purpose. Image processing is also an technique that responds to various Artificial Intelligence techniques in real-time [4]. Artificial Intelligence is nothing but the technique of creating and implementing various intelligent responses. Artificial Intelligence is the important objective of project model which gives ability to robots i.e. acquires knowledge from the environment. Audio filtering is the technique which is used for the processing on voice commands. Figure 1 shows the Study & process flow and Figure 2 shows the block diagram.
Figure 1. Study & Process Flow
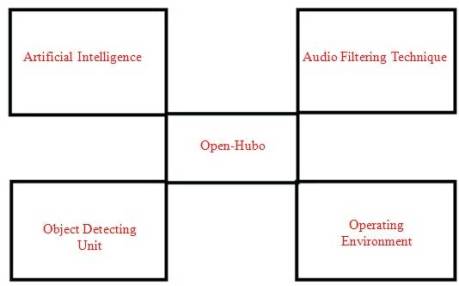
Figure 2. Block Diagram
This algorithm is used to give proper dynamic response to the conversation of the human. That is, whenever human interacts with the robot, there are multiple combinations of sentences, words, alphabets. Hence, to give proper response to human as per his/her mood (by detecting through frequency of voice signal), this automata pattern is used. It not only gives proper response, but also able to adopt new techniques.
Particle Swarm Optimization (PSO) is used to give the knowledge to the robot regarding the object and environmental conditions. It is very helpful to design the humanoid model where multiple people interact with the machine.
This model uses both RGB(Red, Green, Blue) image attributes and HSI model, in which H represents hue, S the saturation and I indicates the density (or intensity), corresponding to gray-scale imaging and image brightness. This is a very important technique for the detection of errorless, noiseless and clear image for processing.
In the Multi-tier image attribute system, the attributes of image given for processing is able to work on the user defined or customized mode, in which user can customize the attributes of the image like RGBHSI (Red, Green, Blue, Hue, Saturation, Intensity),etc. As per the user requirements and clarity requirements, the attributes will be managed by user or programmer.
Synthetic Brain is nothing but the ability of the robot to give the proper response to user commands in real-time environment. For that purpose various techniques are integrated to give proper responses like detecting the object and includes the image processing technology (HAAR Technique). To make the robot workable and mobile, various motors of different strength are used and for listening to the commands properly Audio filtering concept is used, For making the chatting unit in the robot, VERBOT technique is used [10], [11].
Image Processing is used in the project for object detection purpose by which the developer is able to train the robot for multiple objects (Figure 3).

Figure 3. Image Detection Block Diagram
HAAR classifier is the open source technique used for Image processing
In order to control the human's attention, the robots should perform three consecutive tasks (Figure 4 and Figure 5):

Figure 4. Communication with robot
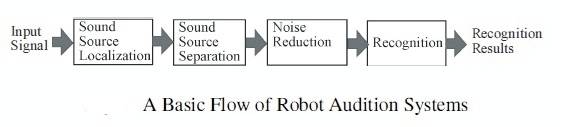
Figure 5. Audio Filtration Mechanism
Figure 4 illustrates the conceptual process of Attention Control (AC) in terms of sub tasks. To perform a successful AC process, both robot (R) and human (H) need to show some explicit behaviors and to respond appropriately to them by communicative behaviors in each phase. That means, R and H perform a set of behaviors, R = {φ, ψ, ω}and H = {λ, δ, μ}. We show that signals for AA, MEC and SA of the robot are able to control the human attention from one direction to that indicated by the robot through experiments. In this work, a set of behaviors of robot such as φ = {head turn, head shaking, reference terms}in the Attracting Attention phase, ψ= {frontal face detection}in the Making Eye Contact phase, and ω= {head turn}in the shifting attention phase respectively is applied. It is expected that humans also perform some responsive behaviors, such as λ = {head/gaze turn toward the robot, body turn toward the robot} in AA phase, δ = {keep looking toward the robot while blinking}in MEC, and μ = {turning head/gaze toward the robot intended object}in SA phase respectively. Also, the block diagram and mechanism of Audio filtration are shown in Figures 6 and 7 respectively.
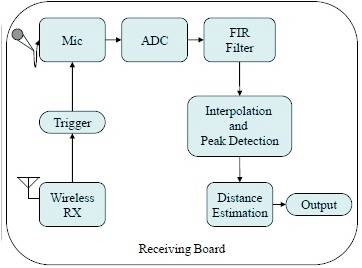
Figure 6. Block Diagram of Audio filtration
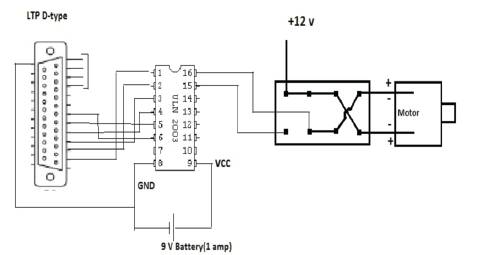
Figure 7. Audio Filtration Mechanism
Dual relay circuit is used for operating the motor in both directions i.e. clockwise and anticlockwise.