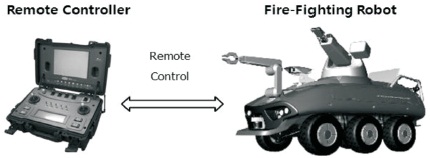
Figure 1. Fire-Fighting Robot and Remote Controller
Fire is an unavoidable disaster that occurs suddenly or unintentionally in place mostly in household residence. To observe continuously for accidental fire, it is not possible to appoint a person and that's why one takes the help of robot. In such cases these robots come in picture and will detect fire remotely. These kinds of robots are mostly useful in industries where probability of occurrence of fire accidents is more. These robotic vehicles are able to detect the fire and extinguishes the fire automatically with the help of temperature and gas sensor. To control the movement of robot, it contains motor driver and gear motors. Normally, the relay detects the fire and also exchanges or shares information with microcontroller through bluetooth module. The robot contains a jet water spray to extinguish the fire. If robot comes across some obstacle then it will not collapse and prevent itself automatically because it detects obstacle with the help of ultrasonic sensors with limited range. The communication between mobile phone and robot will take place through bluetooth which have graphical user interface to control the robotic movement. Some work has already been done in this field but significant scope is still left. Earlier, it has been observed that the robots operate with the limited range and also with microcontrollers with limited features. Now, we have planned to make our project in this field with improvements in terms of range and performance, therefore we have done review on this topic to find out problems. In this paper, we propose a prototype of an improved version of fire extinguishing robot using Arduino controller.
Detecting fire and extinguishing it is a dangerous job that puts life of a fire fighter at risk. There are many fire accidents in which fire fighter had to loose their lives in the line of duty each year throughout the world. The research and development in the field of Artificial Intelligence has given rise to robotics. Robots are implemented in various areas like industries, manufacturing, medicines, etc. Hence, robotics can be used to assist fire fighters to perform this task of fire fighting and thus reduce the risk of their lives. Fire fighter is a robot designed to be used in such extreme conditions. It can be operated and controlled by remote user and has the ability to extinguish fire after locating the source of fire. It is equipped with a monitoring system and operates through a wireless communication system. The fire detection system is designed using the sensors mounted on the fire fighter robot. The robot is controlled autonomously using Android application.
Firefighting and rescuing the victims is a risky task. Fire fighters have to face dangerous situations while extinguishing the fire. Fire fighters extinguish fires in tall buildings, drag heavy hoses, climb high ladders, carry victims from one building to another. In addition to long and irregular working hours, fire fighters also face unfriendly environment like high temperature, dust and low humidity. Besides, they also have to face life threatening situations like explosion and collapsed buildings. According to the report of IAFF in the year 2000, 1.9 fire fighters per 100,000 structure fires have lost their lives per year in USA. However, this rate has been increasing to 3 per 100,000 structure fires. The different causes of Line Of Duty Deaths (LODD) are smoke inhalation, burns, crushing injuries and related trauma. Statistics shows that the deaths of fire fighters are constant every year. This results indicate the need of firefighting machines to assist the fire fighters to avoid deaths by handling the dangerous situations.
If a robot is used which can be controlled from a distance or which can perform actions intelligently by itself, it will reduce the risk of fire fighters. Robot is a mechanical device that is used for performing tasks that includes high risk like fire fighting. There are many types of robots like fixed base robot, mobile robot, underwater robot, humanoid robot, space robot, medicines robot, etc. Fixed base robot has limited workspace due to their structure. Workspace of the robot can be increased by using a mobile platform. These type of robots are called mobile robots. Mobile robots are used in mining, military, forestry, security, etc. Mobile robots can also be used for extinguishing fire in tunnels, industries, hospitals, laboratory and in homes. A fire fighting robot will decrease the need of fire fighters to get into dangerous situations. Further the robot will reduce the load of fire fighters. It is impossible to extinguish fire and rescue many victims at a time of huge disaster. Robot technology can be very efficiently used in such cases to rescue much more victims. Thus robotics makes human life easier and safe as well as save a lot of time. The rapid development in technology improves the tools and equipments used in firefighting. These advance tools and equipments can be more effective and efficient. Moreover, it reduces minimum risk level. This will also reduce the damages caused due to an fire incident.
Android is based on Java programming language and is platform independent. Therefore it can be used in student projects. Android application is a program that can run on Android operating system and provide the required functionality to the user. The Android platform includes support for Wifi communication. Using the Wifi APIs, an Android application can scan for Wifi devices, connect to other devices, transfer data to and from other devices, etc. The advanced industrialized societies in the metropolitan areas consists of dense apartment blocks, factories, offices complex and buildings. The gas stations and oil reservoir are also found in these areas and both are highly flammable. In these situations, fire fighting robots are extremely necessary because due to smoke, high temperature, as there is a possible chances for explosions. The fire extinguishing robots are used in situations where humans cannot reach and work. Hence, in these situations fire fighting robot may be operated through the remote control with fixed distance and can save large revenue for any individual or organizations and most importantly saving human life from unexpected danger. The remote control based fire fighting robot is shown in Figure 1. But, in the present time due to advancement in the technologies one can make more efficient robot for this purpose. In this present paper, a literature review has been done for fire extinguishing robot. In future one can make multitasking robot in case of emergency situations.
Figure 1. Fire-Fighting Robot and Remote Controller
Amano (2002) has discussed about the problems and present status of fire fighting robots. He reported that the some department of a local authority in charge of preventing and fighting fires have already developed rescue robots. In this paper, author has examined robots in two points of view, one is size and weight and second is cost and performance. He discussed some ways to save and rescue much more human lives. Author has considered on monitor nozzle vehicle, under water searching robot, Reconnaissance robot, Rescue robot.
Motorola manufactured micro-controller with expanded memory autonomous robot has been discussed in Dearie et al. (2001). This fire fighting robot has been introduced with some advanced features such as environmental sensing and awareness, proportional motor control based upon environmental factors, digital speed decoding through programmable logic, differential drive control, and isolation of low and high power systems.
An advanced robot for fire-fighting and disaster preclusion are described and has been discussed in Kimura (1991). The robot has been used in the disaster-fighting personnel to seize disaster status. In this fire extinguisher robot, the thermal protection technology, gas pressure servo actuator, vibration repressing control for flexible manipulators, locomotion mechanism, medium range laser visual sensor and short range ultrasonic visual sensor have been used to make the robot efficient.
The firefighting robots control systems have been presented in Krasnov and Bagaev (2012). In this paper authors have discussed the variety of different firefighting robots with their advantages and imperfections.
A computer vision based algorithm for fire detection and for directing the robot towards the detected fire has been reported in Rangan et al. (2013). Authors have used color segmentation for initial detection and for extraction of nonstatic property of fire correlation. UV-TRON sensor has been used to corroborate the existence of fire along with depth mapping.
A modular design on proximity, vision and IR sensors based fire-fighting model has been reported in Gao et al. (2018). For extinguishing flame, the robot will spray water from manipulator. The obstacle avoidance, flame detection, motion control with integrated tracking has been done by the software. Here, robot also can transfer video to remote location.
A single longitudinal arm suspension structure for firefighting robot is proposed and reported in Ma and Li (2018). Authors said that the proposed technique has good adaptability to the ground. The ground performance has also been verified experimentally.
A fire fighting robot with streaming video camera has been reported in Uaday et al. (2019). This fire fighting robot can transmit live video from its surroundings to remote location. The RF signal is used for signal communication purpose. For removing of smoke, suction vacuum fan and cylinder has been also connected with this robot. Authors emphasized that the design of the robot is cost effective and it makes it attractive for deployment in developing countries.
A dynamic modeling of a tracked mobile robot for firefighting is reported in Zhang and Ke (2015). The authors have considered jet velocity and pitch and tilt angles for fire monitoring purpose. Some main issues have been discussed such as slipping and tipping over of the robot during fire extinguishing. A voice commands based touch screen has been reported in Maddukuri et al. (2016). Authors emphasized that by this robot communication can be done in the group.
Rolly firefighter robot by Dubel et al. (2003) describes a robot that searches house using floor plan which extinguishes the fire and return back to its original position. Figure 2 shows the photographic image of a Rolly fire figher robot. The ultrasound sensors provide data which is achieved by the autonomous movement of the robot in the house. The operation of the extinguishing method is implemented by the arm which is controlled by servo motors (Saravanan, 2015).

Figure 2. Rolly Firefighter Robot (Saravanan, 2015)
In the work of Abd Majid (2014), the Fire Protection Robot enters a room and searches for extreme heat. The robot when detects huge amount of light, it uses color camera spot. If large amount of heat is generated, the robot finds the light source and automatically the heat sensors are activated (Sonsale et al., 2014). If there is any heat sources found, then fan of the robot is turned on and starts rotating to put off the flames. If the flames does not put off, the robot continues to rotate the fan and when the flame is extinguished, the robot leaves the room (Khoon et al., 2012). Figure 3 shows the fire fighting robot setup.
Figure 3. Fire Protection Robot (Khoon et al., 2012)
The firefighting and supervising self-sufficient robot by Prabha and Shivaanivarsha (2017) explains the autonomous firing robot which is divided into two robots. First robot controls the second robot by applying the radio frequency. Then second robot perceives the firing spot and drives the motor driver to that targeted area and spray out water from the basin. According to the quick response, this is found to be lengthy process.
Mittal et al. (2018) made a project on simple and cost efficient robot consisting of bluetooth control option.
Autonomous mobile robot, as shown in Figure 4, recognize and response to fire micro controller and bolstered via RC circuits for dc engines and additional electronic parts (Zaman et al., 2018). The batteryoperated checking circuit has been set up in the robot to notice the work of overall function of the robot (Krasnov & Bagaev, 2012).

Figure 4. Autonomous Mobile Robot: Recognize and Response fire (Zaman et al., 2018)
The main objective of the work is to make an effective fire extinguishing robot with better performance and with competitive pricing. In our project, we will build up an Arduino based quencher robot that have a double favorable position which can detect the fire and can put it off before the fire becomes out of control. In this project, we will construct a robot utilizing Arduino that could move towards the fire and siphon out water to quench the fire. The system can be isolated into three distinct parts namely mechanical structure, hardware and software (Merino et al., 2015).
In our proposed work, Arduino Uno module to is used to control and guide the robot. Also, four servo motors and small ply board and also motor will be connected through the connecting wires. At first we fix the four wheels at the edge of the ply board and connect all the following material like flame sensor, arduino, motor driver, servomotors, and mini water pump and complete the whole block diagram as shown in Figure 5. After completion of the project, the robot will move in the room and will detect the fire. If the temperature at certain place is more than the threshold value, then water pump will start working. The main advantage of this work is that the robot is completely autonomous and it will detect any obstacle through the Android application. In this project the speed and range will also be extended. In our work Bluetooth technology will be used in an efficient way (Park et al., 2010).
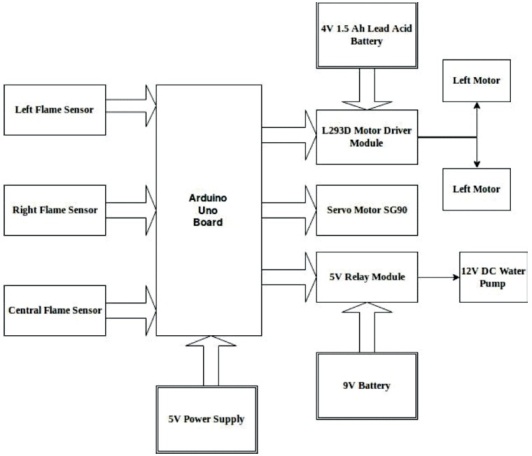
Figure 5. Block Diagram Proposed for Fire Extinguishing Robot (Park et al., 2010)
For giving a solid base to the robot, a metallic robot chassis is selected. There are two wheels on the back side of the robot and a castor wheel on the front side. The castor wheel empowers 360 levels of versatility to the robot. The body of the robot can be made of acrylic sheets which can be impervious to high temperatures. This body is utilized to shield the interior electronic hardware from the outside variables, for example, heat, and mechanical jerks (Shah et al., 2013).
The fire sensors are introduced on the front side of the robot for identifying the fire. The water holder is put on the center of the chassis to keep up the focal point of gravity in the middle and subsequently keep the robot from overturning (Hadjisophocleous & Fu, 2004; Mangayarkarasi, 2018).
The hardware used is Arduino UNO board, L293D Motor Driver Module, DC geared motors, 12V DC pump, 5V Relay Module, Servo Motor SG90, IR based Flame Sensors, 5V DC Jack, 9V battery, 4V 1.4 Ah Lead Acid battery.
For programming the control of the robot for portability and fire location and extinguishing, Arduino IDE is utilized.
Following steps are followed for the programming of the robot for detection and to extinguish fire and the flowchartis illustrated in Figure 6.

Figure 6. Flow Chart of Fire Fighting Robot (Promod et al., 2019)
At the point when the robot is turned on, it begins moving forward with both the motors in ON condition. For this situation, no fire is recognized by the fire sensors. Thus the water siphon and the servo motor both remain OFF.
At the point when the fire is identified by the central fire sensor, the robot eases back down, pushes a specific distance ahead with both the engines ON and afterward stops at a specific distance. At that point the water siphon is turned ON and the servo motor is likewise turned ON. Consequently the water is consistently splashed onto the flames until the fire is quenched. When the fire is stifled, both the water siphon and the servo motor are turned OFF and the robot again begins to continue forward. At the point when the fire is identified by the left fire sensor, the robot eases back down, moves a specific distance towards left with the correct motor ON and the left engine OFF and afterward stops at a specific distance. At that point the water siphon is turned ON and the servo motor is likewise turned ON. Subsequently the water is consistently showered onto the blazes until the fire is doused. When the fire is doused, both the water siphon and the servo motor are turned OFF and the robot again begins to continue forward (Kadam et al., 2018; Su, 2006; Suresh, 2017).
At the point when the fire is identified by the right fire sensor, the robot eases back down, moves a specific distance towards left with the correct motor OFF and the left motor ON and afterward stops at a specific distance. At that point the water siphon is turned ON and the servo engine is likewise turned ON. Subsequently the water is consistently splashed onto the blazes until the fire is stifled. When the fire is quenched, both the water siphon and the servo motor are turned OFF and the robot again begins to continue forward (Park et al., 2010; Raia et al., 2014).
The fire fighting robot helps to detect the exact direction of fire source and it has the capability of sensing accurately with increased flexibility. It is reliable and economical; by placing the sensors appropriately we can efficiently detect the location of the fire. The fire extinguishing robot will be utilized at those places where it seems hazardous and people cannot enter.
This robot can move naturally inside the room where the action of fire happened.
After all these advantages the robot has limitations too.
It cannot work beyond a limit, i.e., time bounded work. Data rate transmission is lower than wired transmission. Our project is for only small capacity of water or snow, i.e., small tank is here. Hence, it could not be used to put out large fires.
The fire fighting robots are designed to not only extinguish the fire but also to save the lives of firemen and properties. It could be used to fight fires in hazardous location which firefighters cannot access safely. Also it could be used to enter small spaces that are impossible to be accessed by a person. It can be used in industrial, commercial, domestic, defense, fire department, health monitoring, power plant control rooms, captain bridges and flight control centers, etc., as the requirement demands.
Since we realize that the robot will be moving by itself into the fire zone without anyone else. To improve the route by the client present at a distant zone, this proposed component will be useful enough. By this feature, any individual can notice the way the robot is moving. In the event where the robot go as in the wrong way, the client can correct it as indicated by this view from its camera accessed through its Bluetooth feature (Promod et al., 2019).
Future work will increase the size of the water tank, the robot will its activity in the field. This will eventually improve the robot to work for a more time. (Promod et al., 2019).
Bringing different sorts of sensors into the current structure of the robot will help in incredible way. Improving the nature of fire detection will be done by adding the temperature sensor. Then by sensing the intensity of the fire, more intensity fire will be extinguished first and less intense fire later.
Many a time on extinguishing the fire the robots could burn itself. To protect it from fire, a fire blanket will be used. Fire blankets would help the robot to protect its own existence.
A firefighting robot would be developed with an aim to assist firefighters and mitigate the fire hazards. The proposed would robot monitor the temperature, heat and air quality in the firefighting environment using the fitted camera (Diwanji et al., 2019).
By reviewing all the papers we mainly observe that fire extinguisher robots are necessary to be upgraded in the given technology era. By using Arduino in our project, makes the robot to detect fire easily without human intervention. Use of flame sensors (right, left, upward and downward sensors) helps robot to detect and quench the fire. Also, when it fails to sense the fire, it can be controlled manually, by using Bluetooth control option.
Finally, we can conclude that, we still need awareness regarding fire extinguishing robots and work on it continuously for better efficiency, performance and reliability.