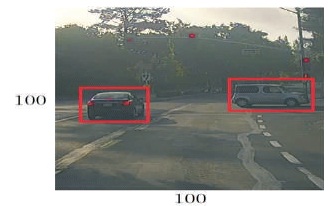
Figure 1. Input Image
One of the major problems faced by people in their daily life is traffic. An efficient management system is required to provide efficient traffic control system. Identification of particular vehicle in the traffic flow is a notable task in the traffic management system. In this research work, the authors propose an automatic traffic management system for vehicle detection and counting and automatic signals Scheduling. The camera supplies video input to the processing engine. Initially, the video will be streaming on all four roads of the traffic circle. The values will be read frame by frame in the streaming video of these roads. Camera sends all the captured input images to the processing engine and this works based on the neural network. The traffic flow shows the traffic state in fixed time interval and helps to manage and control the traffic, especially when there is a heavy traffic and will consider emergency vehicles like ambulance and fire brigades, giving them priority to go.
Traffic is a major issue in every city. The traffic mostly affects the emergency service vehicles such as ambulances and fire brigades badly. One of the critical problems faced by vehicle riders in their daily life is traffic congestion. A highly monitored traffic control system is required to provide an efficient traffic control system for emergency vehicles. Emergency vehicle detection is an important core part in today's traffic management system. In this research work, the authors propose an automatic traffic management system for vehicle detection and counting and automatic signals scheduling. Ambulances and fire brigades are usually allowed by all the co-travelling vehicles on the road on humanity grounds.
But when it comes to huge cities with lot of traffic jam, these emergency vehicles are not able to provide its services on time. In this work, these emergency vehicles are detected and are allowed to move even in any traffic condition by keeping the rest of the vehicles on other ends in standby. The emergency vehicles will be given prominence in all the traffic signals.
According to the authors, Buhler, Lambert, and Vilim, (n.d), YOLO is a fast, accurate object detector, in Tensor Flow. It contains publicly-available dataset containing several million natural images. We use the PASCALVOC2007, a set of RGB images labeled with bounding box coordinates and class categories. The CNN learns high- quality, hierarchical features automatically, eliminating the need for hand-selected features. It solves the object detection and object classification tasks. This function simultaneously penalizes incorrect object detections as well as considers what the best possible classification would be (Buhler et al., n.d).
According to the authors, Jadhav, Kelkar, Patil, and Thorat, (2016), a smart traffic control systems is developed for estimating the traffic and this method has been implemented using Image Processing and Matlab software. This is done by using the camera images captured from the highway and videos taken are converted to the image sequences. Each image is processed separately and the number of cars has been counted. If the number of cars exceeds a specific threshold, warning of heavy traffic will be shown automatically (Jadhav et al., 2016).
According to the authors, Hegde, Sali, and Indira (2013), lack of efficient traffic control and management has many times lead to loss of lives due to ambulances getting stuck in traffic jams. To overcome this problem, the authors have proposed on RFID and GPS based Automatic Lane Clearance System for Ambulance. This method is considered as one of the efficient methods for emergency vehicles as long as vehicle is connected to the GPS system. The focus of this paper is to reduce the delay in arrival of the ambulance to the hospital by automatically clearing the lane in which ambulance is travelling, before it reaches the traffic signal. This can be achieved by turning the traffic signal, in the path of the ambulance, to green when the ambulance is at a certain distance from the traffic junction. The use of RFID distinguishes between the emergency and nonemergency cases, thus preventing unnecessary traffic congestion. The communication between the ambulance and the traffic signal post is done through transceivers and GPS (Hegde et al., 2013).
According to the authors Tao, Wang, Zhang, Li, and Yang (2017), an object detection system was built for images in traffic scene. It is fast, accurate and robust. Traditional object detectors first generate proposals. After that the features are extracted. Then a classifier on these proposals is executed. But the speed is slow and the accuracy is not satisfying. YOLO, an excellent object detection approach based on deep learning presents a single convolutional neural network for location and classification. All the fully-connected layers of YOLO's network are replaced with an average pool layer for the purpose of reproducing a new network. The loss function is optimized after the Processing of bounding coordinates error is increased.
A new object detection method, OYOLO (Optimized YOLO), is produced, which is 1.18 times faster than YOLO, while outperforming other region-based approaches like R-CNN in accuracy. To improve accuracy further, we add the combination of OYOLO and R-FCN to the system. For challenging images in nights, pre-processing is presented using the histogram equalization approach. They have achived more than 6% improvement in map on their testing set (Tao et al., 2017).
According to the authors, Jensen, Nasrollahi, and Moeslund (2017), Traffic light detection (TLD) is a vital part of both intelligent vehicles and Driving Assistance Systems (DAS).
Generally, for most TLDs, they are evaluated on small and private datasets making it hard to determine the exact performance of a given method.
In this paper, the authors apply the state-of-the-art, real-time object detection system ‘You Only Look Once (YOLO)’ on the public LISA Traffic Light.
Dataset available through the VIVA-challenge contains a high number of annotated traffic lights, captured in varying light and weather conditions. The YOLO object detector achieves an AUC of impressively 90.49% for day sequence 1, which is an improvement of 50.32% compared to the latest ACF entry in the VIVA challenge. Using the exact same training configuration as the ACF detector, the YOLO detector reaches an AUC of 58.3%, which is an increase of 18.13% (Jensen et al., 2017).
The purpose of this paper is to provide high priority for the emergency vehicles like ambulances, fire brigades, and VIP vehicles to go in traffic signals. In a busy schedule, thousands of vehicles passing through the traffic, it may not always be possible for traffic police officer to schedule the signal instantly and usually the traffic signals will not do this automatically based on the traffic strength. The disadvantages associated with the manual traffic control system are several. Few to note are (1). It is a very tedious job for traffic police to route the emergency vehicle by stopping other routine vehicles. (2). Its time consuming to get control over the traffic to make a space for the emergency vehicle.
Initially, the video will be streaming on all four roads of the traffic circle. The values will be read frame by frame in the streaming video of these roads. Camera sends all the captured input images to the processing engine and this works based on the neural network (Redmon, Divvala, Girshick, & Farhadi, 2016; Yang, Zhang, Wang, & Zhang, 2018). It is one of the algorithms in machine learning and it has three layers in it. First one is input layer, it stores captured data. Second one is hidden layer; it divides the images into regions and predicts boundary boxes and probabilities for each region, this boundary boxes are weighted by the predicted probabilities.
Third one is output layer; it has trained set of data. The counter value is set to 60 seconds. When the emergency vehicle enters the non-green lane, that will be detected using YOLO and the signal wait timing is reduced and the vehicles in that lane are allowed to move. After this the signal timing works on the round robin fashion. After the emergency vehicle moves, the signal will become green at the next lane and the vehicles are allowed to pass (Zhang, Huang, Jin, & Li, 2017).
This works in clock-wise direction, where the emergency vehicle was allowed to pass, that lane's signal waiting timing will be reduced to half of its actual timing, i.e., 30 seconds. If the two or more emergency vehicles are encountered at different lanes, then it works on “First come first serve”method.
The YOLO algorithm works in this fashion:
Step 1. It receives an input image (Figure 1).
Figure 1. Input Image
Step 2. Divides the input image into specified grids say for example 3x3 grids (Figure 2).
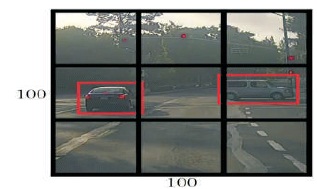
Figure 2. Input Image into Specified Grids (3x3 Grids)
Step 3. Then apply the image classification and localization on each grid and locates the bounding boxes and their corresponding class probabilities for objects if there are any (Blaschko & Lampert, 2008). Let us say the classes are truck, car, and bus respectively. So, for each cell, say, the label z will be an eight dimensional vector. Therefore
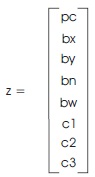
where,
pc defines the probability of object presence in the grid cell.
bx, by, bn, bw indicate the bounding boxes if object is found.
c1, c2, c3 specifies the classes, if the object is car, so, c2 will be 1 and other two classes c1 & c3 will be 0.
But there are few notable disadvantages as well:
In the system architecture as shown in Figure 3, first we will set timer for the camera. Then camera captures all the images coming through the lane as referred in Figure 4.
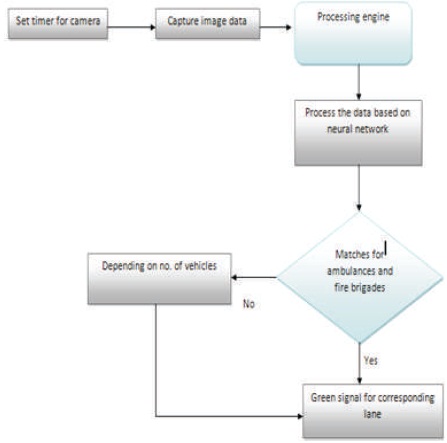
Figure 3. Architecture Diagram
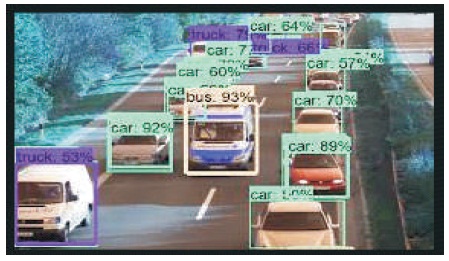
Figure 4. Object Detection in the Lane
After that, it sends all captured input to the python code. The python code compares the image with the YOLO dataset and lists the specified objects present in the input image as shown in Figure 5. We have considered ambulance, fire brigade, and VIP vehicles as emergency vehicles in the proposed method.
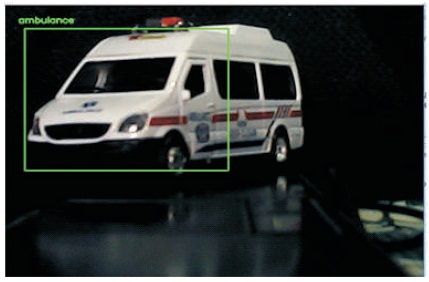
Figure 5. Object Detection
If there is an ambulance present in the image, the python code will send the ON signal to the Arduino board. Once the Arduino board recognizes the ON signal, it will change the signal light from red to green until the ambulance crosses the signal. If the captured data matches with ambulances or fire-brigades, automatically traffic light releases a green signal color to the corresponding lane otherwise depending on the number of vehicles, it changes the traffic signal color to green as shown in Figure 6.
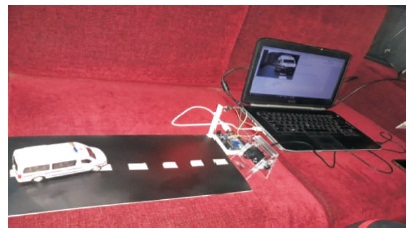
Figure 6. Vehicle Routing
The test case results are shown in Table 1.
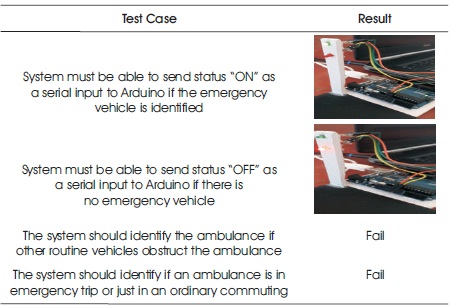
Table 1. Test Cases
In this paper, the authors have proposed a method for routing the emergency vehicle using YOLO. This is achieved by using captured video from the camera and each frame in a video is processed separately. If the specified emergency vehicle is found, then traffic signal light changes from red to green. Emergency vehicles like ambulance and fire brigades are given first priority to move. The advantages of this new method are low cost, easy setup, and relatively good accuracy and speed.
Because this method has been implemented using YOLO framework, production costs are low while achieving high speed and accuracy.