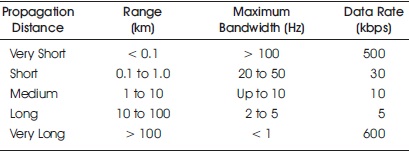
Table 1. The Possible Bandwidth for Different Acoustic Propagation Distances (Zeng et al., 2016).
Underwater communication (UWC) has become an important data transmission technology for commercial and military marine applications in the past couple of decades. Besides regular communication inside the water, other applications include Remotely Operated Vehicles (ROV), Underwater Sensor Networks (UWSN), Autonomous Underwater Vehicles (AUV), underwater sports, coastal surveillance systems, environmental research, oil-rig maintenance, linking submarines to land, etc. The main limitations of Underwater Acoustic Communication are frequency-dependent attenuation, short range of communication, very low bandwidth, and very low data rates for monitoring applications because of velocity of sound in water. To beat the restrictions of acoustic communication is to use optical communication whose wavelength lies within the visible region. Consistent with our survey on the properties of acoustic and optical communication, results have shown significant trade-offs between bandwidth, propagation delay, power consumption, SNR, BER and effective communication range. We propose a hybrid solution that mixes the uses of both acoustic and optical communication with the assistance of opto-acoustic modems. Hence, this hybrid approach leads to high data rates, low latency, and an energy-efficient system. Thus, an underwater opto-acoustic modem plays an important role for long distance signal transmission in underwater. This paper provides a comprehensive study of the recent developments and challenges in various underwater modems and also addresses the gaps in development of modems for long distance under water communication. This paper not only provides exhaustive research in underwater acoustic/optical communication using opto-acoustic modems but also aims to provide the development of new ideas that would help in the growth of future underwater communication using fifth generation (5G) communication techniques.
Our planet is the only one on which water can be found, and it covers more than 70% of its surface. Monitoring different phenomenal activities in an underwater environment, such as environmental impact surveillance, marine life, oil and gas exploration is essential in underwater. In this regard, underwater wireless communication (UWC) has become a significant field. Optical, acoustic and electromagnetic waves have been widely used for data transmission in UWC. Investigation of possible UWC techniques has an influential impact on wireless communications (Ali et al., 2019). Global warming has become an issue for several decades. The melting of the polar ice caps as a result of global warming causes rising sea levels. Hence, the importance of observing ocean environmental activities like oceanographic data collection, water sampling, etc., has gradually increased with time variation. Underwater Wireless Communication (UWC) supports surveillance of coastal securities, especially for military purposes and commercially for investigation of natural resources in underwater environment. Moreover, it also helps to map and discover unknown regions underwater. Nowadays, UWC is being used for experimental observation, data collection and analysis, underwater navigation, disaster prevention and early detection warning of tsunami (Uysal et al., 2016). Optical, acoustic and electromagnetic (EM) carriers are considered for underwater applications. Deploying UWC techniques in an unexplored water medium are highly challenging as compared to terrestrial wireless communication (Zhou & Wang, 2014). However, the quality and reliability of data transmission in shallow and deep water are dependent on the physical characteristics of the water channel (Lanbo et al., 2008). The Quality of Service (QoS) of UWC, depends on the physicochemical properties of water medium and physical characteristic of optical, acoustic and EM waves. UWC plays a vital role in deployed underwater applications, which has a powerful impact on the communication network. The deployment of communication network in underwater systems consist of fixed and anchored sensor nodes with the seabed, floating unmanned underwater vehicle nodes (UUVs) or autonomous underwater vehicle (AUVs), signal receiver processing towers, floating devices (buoy), submarines, ships and onshore base stations (Gussen et al., 2016). Radio frequency (RF) from 3 Hz to 3 kHz frequency range is capable for high data acquisition and transmission in shallow water over short distances and usually attenuated easily by seawater (Hanson & Radic, 2008). On the other side, acoustic waves are affected by different propagation factors due to ambient noise, external interference, watersurface geometrical expansion, attenuation, multipath effects, and Doppler spreading. Optical waves have high bandwidth, but affected by absorption, scattering and different level of underwater temperature. Underwater wireless optical communication (UWOC) has been less explored and somewhat challenging when compared to deploying acoustic propagation underwater (Kaushal & Kaddoum, 2016). The existing underwater wireless acoustic communication (UWAC) has limited performance due to low bandwidth, latency and multi-path propagation in underwater medium. The maximum data acquisition in UWAC is roughly 100 kbps for short distances while 10 kbps over long distances. The possible bandwidth with respect to propagation distance in UWAC are listed in Table 1.
Table 1. The Possible Bandwidth for Different Acoustic Propagation Distances (Zeng et al., 2016).
In the last decade, optical communication has gained attention for space, terrestrial and underwater communication due to high data rate with minimized power consumption. Many researchers have carried extensive work on terrestrial and space optical links, however underwater communication researches are relatively challenging due to varying processes involved ranging from shallow water to deep ocean. The present technologies also use acoustic underwater communication for short-range communication though it suffers transmission loss, Doppler effects and multipath effects. All these critical factors have led to the spatial and temporal variations which have intimately led to the availability of limited bandwidth for the communication system. Depending on the transmission distance the acoustic communication links are classified as very short, short, medium, long and very long. However, the underwater observatories need a communication link which can support data rate ranges to a few tens of Mbps. Figure 1 shows the design issues and challenges in underwater communication (Kumar et al., 2019).
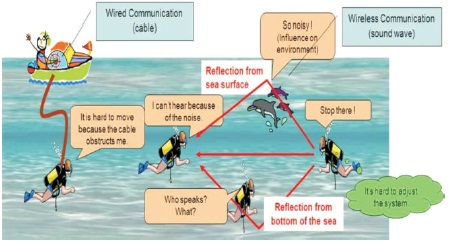
Figure 1. Design Issues and Challenges in Underwater Communication (Kumar et al., 2019)
The underwater communication has gained wider scope in oceanography studies, real time video streaming, sea floor level monitoring and survey, tracking moving objects, offshore oil exploration, etc. Initially all the techniques for communications are designed for terrestrial communication and these are modified and adopted for underwater communication channels. For long distance underwater communication, acoustic communication has been adopted as the best suited method despite key challenges like low bandwidth and low latency. The distance for acoustic communication ranges from a few hundred meters to a few kilometers (Akyildiz et al., 2005). One of the methods for underwater communication is fiber optic cable which is capable of high bandwidth and long range of communication. However, this technology is found to be inadequate and less capable in Autonomous Underwater Vehicles (AUV) and remote vehicle communications since this technique involves physical connectivity of cables for communication. As a promising technique and alternative for these, underwater optical communication has been adopted for successful scientific, military and commercial applications (Baiden et al., 2009; Friedman, 2009; Gabriel et al., 2013; Munafò et al., 2011). RF communication is less preferred underwater due to its severe attenuation (>150 dB/m) in sea water (Lacovara, 2008). Since the absorption level of sea water is low in the blue-green range of EM spectrum, underwater wireless optical communication is found to be efficient and highly secure with high data rate for communications in submarines, ships, unmanned vehicles, buoys, divers and underwater sensors within a range of less than 100 m. It can also be used to study the ecological, biochemical and climatic changes in oceans and seas (Arnon, 2010; Heidemann et al., 2012).
The main purpose of this survey is to understand the characteristics and existing features of acoustic/ optical UWC. This review is a collection of recent researches in the next generation techniques for UWC. Design issues, recent advances and future challenges for underwater acoustic/optical communication are described. Future direction for underwater modem including emerging technologies in UWC and integration of 5G in UWC has been discussed.
Kumar et al. (2019) made an extensive overview on the issues and challenges in underwater acoustic and optical communication such as absorption, attenuation, scattering, turbulence, various sources of noises, bandwidth, modulation schemes, etc. A low cost and low power acoustic modem has been designed in Wills et al. (2006) to have better short-range communication. The tests are performed with transducers for an in-air communication. The efficient functioning of the proposed new design modem proved successful transmission and reception of data with low latency. In Santoso et al. (2009), research developments in underwater acoustic communications has been discussed. Underwater propagation characteristics are experimentally presented and the results are used to evaluate the communication performance of the system along with a PC-based soft modem concept. Saeed et al. (2019) presented a comprehensive study on the advances, challenges and various prospects for underwater optical communication. The network architecture, issues in physical layer, modulation techniques and problems in data link layer, channel modelling, connectivity, reliability and congestion control has been addressed in detail. Relaying techniques in network and various routing algorithms has been studied. Goals of application layer and the various state-of-art underwater optical communication application has been put forth. The outline of the various open challenges in the current and future research areas has also been discussed. Khalighi and Uysal, (2014) presented Dual Diffuser Modulation.
Understanding the feasibility and reliability for high data rate for underwater optical communication links for varying propagation phenomena which has impacts on the performance of the communication system focused in Kaushal and Kaddoum (2016). The recent advances in underwater optical communication have been discussed in this paper. Various coding techniques, modulation schemes, channel characterization and various sources of noise and the developments of new ideas are addressed leading to the future enhancement in the existing system of optical underwater communication. A new method of acoustic and optical communication system has been proposed to achieve high data rate with low power consumption (Kumar et al., 2019). Underwater Optical Wireless Communication (UOWC) has recently emerged as a unique technology facilitating high data rates and moderate distance communication in undersea environments (Kumar & Rani, 2019). Many applications with large amount of data such as real-time video transmission and control of remotely operated vehicles could greatly benefit from UOWC (Schirripa et al., 2020).
Zia et al., (2021) presented the design challenges in the state-of-the-art underwater acoustic communication modems. From the analysis, it has been found that the median operating range of commercial modems are 30 times greater than research modems. Similarly, in terms of data-rate, commercial modems are 1.7 times faster than research modems. The common modulation schemes in both commercial and research modems are FSK, PSK, OFDM and SS used in 68.6% of commercial and 84.1% of research modems. DSP is a common hardware platform used in 27.2% commercial and 26.7% of research modems. The other hardware platforms used in research modems are processor/MCU, laptop, and FPGA.
A novel hybrid opto-acoustic modem for underwater communication has been proposed and demonstrated by Kumar et al. (2020). The signal strength obtained for both light and audio signals in air and water medium are found to be same for the reception of the signals in underwater communication too. The reception of both optical and sound signals through a single modem proves the success of the proposed hybrid opto-acoustic modem. Practically the proposed hybrid modem also stands as a simple solution with cost-effectiveness for the forth coming generation of high speed underwater optical/acoustic communication (Kumar et al., 2020). In Gauni et al. (2021), hybrid technology has been chosen because optical transmission can be very useful in transmitting a greater number of bits per joules and acoustic link can be helpful in supporting more number of frequency ranges. As known, optical transmission can transmit 30,000 bits per joules of energy supplied. Acoustic communication can transmit around 100–200 bits per joules of energy supplied. The hybrid system will switch over between acoustic and optical systems depending on the required data rate. The hybrid system model is quite efficient and will increase the data rate and availability of the system.
Ali et al. (2020) proposed 5G wireless networking technique to support RF, acoustic and optical signal carrier for improving communication probabilities. This paper provided a survey on the technical issues, challenges and future directions in underwater environmental communication.
This section provides the details of various design issues, recent advances and future challenges in acoustic and optical underwater communication modems. This also explains the characteristics of Acoustic Communication modem. The common parameters used for both types include: operating range, data rates, modulation schemes, centre frequency, bandwidth, power consumption and bit-error-rate are discussed.
In general, underwater acoustic channels are recognized as the most difficult communication channels by research. Acoustic communication best supports the low frequency communication where the bandwidth availability is very limited. For instance, the operating frequency of an acoustic communication system may be 10-15 KHz. The very low communication bandwidth of the system means the non-negligence of bandwidth with respect to centre frequency. Approximately, sound propagates in underwater at very low speed of about 1500 m/s with the multipath propagation. Distortion of frequency-selective signal occurs due to the delay in spreading. The communication is mainly influenced by Doppler spread, multipath, path loss and propagation delay. All these factors determine the spatial and temporal variability limiting the bandwidth availability which depends on both frequency and range (Kumar et al., 2019).
Acoustic communication links are also classified as horizontal and vertical based on the direction of sound ray. The propagation of sound rays differs consistently with respect to the time dispersion, delay variance and multipath spreads. Acoustic underwater communication is characterized by three main factors namely, attenuation, multipath which is time varying and low speed. The background noise is characterized as Gaussian noise with a decaying power spectral density. The capacity of channel is directly proportional to the distance. There may be impulse response in the communication channel. Each physical path is a time varying Low Pass Filter (LPF) and the movement produces an additional Doppler shifting and spreading. Random signal variations occur due to the internal turbulence, surface waves and fluctuations in the speed of the propagating sound. Hence there is no standard channel fading for acoustic communication channel (Kumar et al., 2019). Figure 2 shows the underwater acoustic communication.
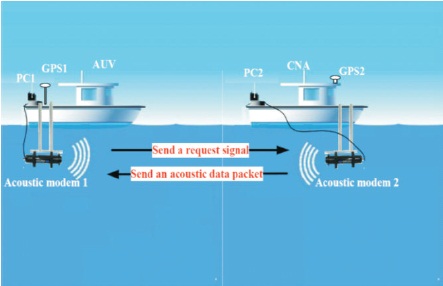
Figure 2. Underwater Acoustic Communication (Bai et al., 2020)
Figure 3 shows the major components of an underwater acoustic modem and the underwater acoustic modem consist of three main components: an underwater transducer, an analog transceiver, and a digital hardware platform for control and signal processing (Benson et al., 2010).
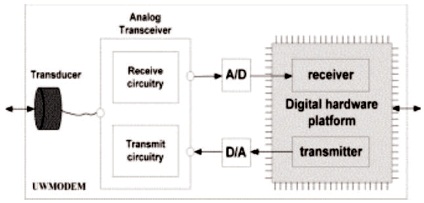
Figure 3. Major Components of an Underwater Acoustic Modem (Benson et al., 2010).
Figure 4 shows the MODEM classification based on frequency (Annalakshmi & Murugan, 2017).
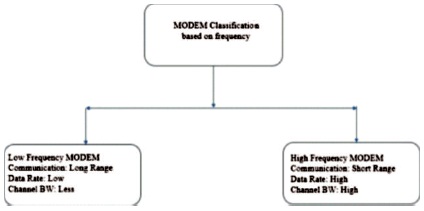
Figure 4. MODEM Classification Based on Frequency (Annalakshmi & Murugan, 2017)
The underwater modems are broadly classified into two types depending on the operational frequencies as low and high frequency modems. Low frequency modems are used predominantly as they provide long range communication at low channel bandwidth which further results in low data rate. The high frequency modem provides higher bandwidth and high data rate but high frequency signal are easily absorbed in the water, which limits the usage of high frequency signals. Till today, many acoustic modems have been implemented for research as well as commercial purposes. Commercial modems are mostly used for data collection, underwater monitoring, positioning and telemetr y. Technical parameters like modulation, bandwidth, data rate, transmission range, application and power of few underwater acoustic modems available are represented in Table 2.
Table 2. Technical Comparison of Various Underwater Acoustic Modem-Commercial
Sound propagation in the ocean is influenced by the physical and chemical properties of seawater and by the geometry of the channel itself. An acoustic signal underwater experiences attenuation due to spreading and absorption (Burrowes & Khan, 2011).
Spreading loss is due to the expanding area that the sound signal encompasses as it geometrically spreads outward from the source.

where r is the range in meters and k is the spreading factor.
The absorption loss is a representation of the energy loss in the form of heat due to the viscous friction and ionic relaxation that occurs as the wave generated by an acoustic signal propagates outwards and this loss varies linearly with range as follows:

where r is range in kilometres and α is the absorption coefficient.
Figure 5 shows the absorption coefficients in dB/km vs signal frequency for both Thorp and Fisher and Simmons coefficients and shows that in general α increases with increasing frequency at any fixed temperature and depth.
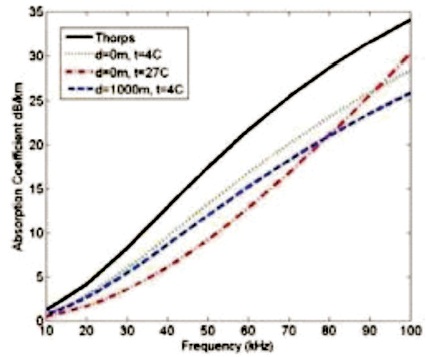
Figure 5. Absorption Coefficient Vs Frequency
Total path loss is the combined contribution of both the spreading and absorption losses. Urick established that this formula of spreading plus absorption yields a reasonable agreement with long range observations (Burrowes & Khan, 2011). Figure 6 shows the Ray Bending Path Loss Mechanisms.

Figure 6. Ray Bending Path Loss Mechanisms (Burrowes & Khan, 2011) (a) Surface Duct and Deep Sound Channel (b) Convergence Zone and Reliable Acoustic Path

Multipath signals, in general, represent acoustic energy loss, however, for communication systems it is the Inter Symbol Interference (ISI) that will also be detrimental at the receiver as it can significantly increase the error rate of the received signal. Multipath signals are created underwater through various mechanisms. There are two major mechanisms responsible for creating multipath signals and these are: reverberation, which refers to the reflections and scattering of the sound signal; and ray bending, which is a result of the unique sound speed structure in the oceans which create temperature gradient channels that trap acoustic signals. Multipath signal formation is therefore determined by the geometry of the channel in which transmission is taking place, the location of the transmitter and receiver, and importantly the depth at which it is occurring. In shallow water, multipath is due predominately to reverberation whereas in deep water it is dominated by ray bending, although reverberation will occur in deep water if the transmitter and receiver are located near the surface or bottom (Burrowes & Khan, 2011).
Doppler frequency spread is an important and noticeable factor in UWAC, due to a low destruction in the performance of digital communication and transmission at high data rate (Saeed et al., 2018).
Geometric expansion is a spreading experience and function of energy loss in acoustic waves over the large area. When the acoustic pulse propagates from source of origin and covers a large water area, the wave energy per unit area become smaller (Saeed et al., 2018).
There are three major contributors to noise in underwater: ambient or background noise of the ocean; self-noise of the vehicle; and intermittent noise including biological noises such as snapping shrimp, ice cracking and rain.
Ambient noise in the ocean has been well defined and can be represented as Gaussian and having a continuous power spectrum density (PSD). It is made up of four components, viz., turbulence noise, shipping noise, wave and other surface noise caused by wind and rain , and thermal noise, each having a dominating influence in different portions of the frequency spectrum. Figure 7 shows the Power Spectral density of the ambient noise (Burrowes & Khan, 2011).
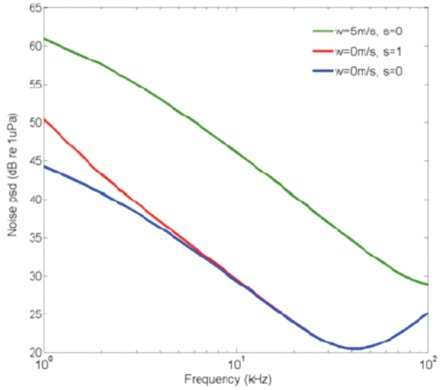
Figure 7. Power Spectral Density of the Ambient Noise, W - wind, S – shipping
Self-noise is defined as the noise generated by the vehicle itself as the platform for receiving signals. In general, as with ambient noise, there is decreasing levels of self-noise with increases in frequency. However self-noise is also significantly affected by speed with decreasing noise spectra when the vessels are travelling at slower speeds or are stationary (Burrowes & Khan, 2011).
The sources of intermittent noise can become very significant in locations or times that they occur close to operating AUV swarms. The two major areas where research has been undertaken are in the marine bioacoustic fields and also the effect of rain and water bubbles created by raindrops.
Rain creates different noise spectrum to wind and needs to be dealt with separately as it is not a constant source of noise. Experiments showed examples of increases of almost 30 dB in the 5 to 10 kHz portion of spectrum in heavy rain, with steady rain increasing noise by 10 dB or sea state equivalent increase from 2 to 6. The average value of rain at the surface from 100 Hz to 10 kHz of -17 to 9 dB. These main contributors to intermittent sources predominate in the lower frequency ranges up to 20 kHz. Thus, interference in the operating frequencies of communication data signals is considered low (Burrowes & Khan, 2011).
Optical waves are also the electromagnetic waves having the wavelength range between 400 nm and 700 nm. Due to their high frequency, short wavelength and high speed, it paves the way for high-speed communication up to 1 Gbps. However, when optical waves are used as the carrier for wireless communication, they are generally limited to a very short distance because of strong water absorption at its optical frequency bandwidth and backscatter due to the suspended particles (Kumar et al., 2019). Figure 8 shows the major components of an optical modem, consists of transmitter unit, water channel and receiver unit.
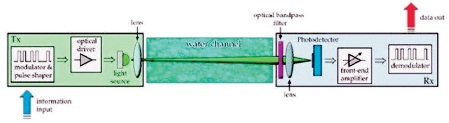
Figure 8. Major Components of an Optical Modem (Schirripa et al., 2020)
The transmitter (TX) is composed of a modulator, optical driver, light source and projection lens. The receiver (RX) is made of optical bandpass filter, photodetector, Low noise electronics and demodulator. In underwater optical communication, the connection between transmitter and receiver can be of two main types as shown in Figure 9 (Darwiesh et al., 2018; Zeng et al., 2016): (a) diffuse line-ofsight (diffuse LOS) configuration; (b) point-to-point line-ofsight (LOS) configuration (Schirripa et al., 2020).
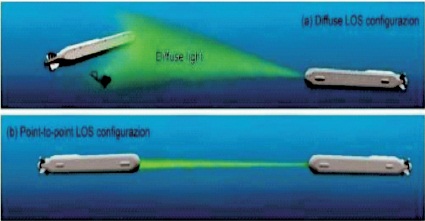
Figure 9. Examples of Different Underwater Optical Wireless Link Configurations (Schirripa et al., 2020)
Figure 10 shows the classification of optical wireless communication system (Alimi et al., 2017).
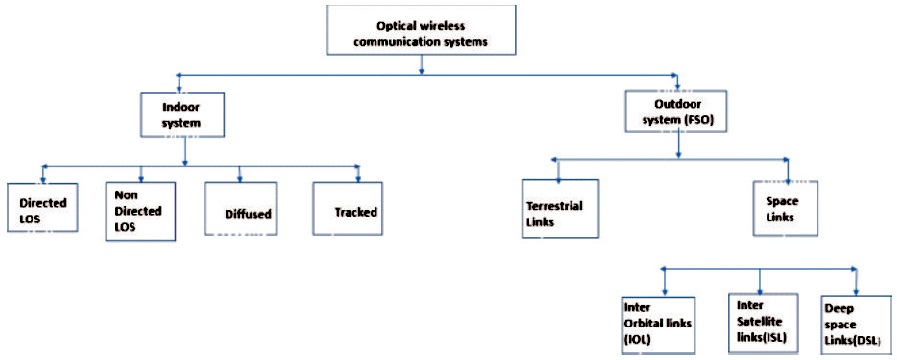
Figure 10. Optical Wireless Communication System Classification
Figure 11 illustrates an underwater optical communication network clusters with terrestrial RF based station. (Ali et al., 2019) Basically, the optical properties of water are divided into two groups which are mutually exclusive as inherent and apparent. The inherent properties describes optical parameters which depends only on the transmission medium and more importantly the composition of the transmission medium along with its particulate substances which are present within it. Whereas the apparent properties depend not only on the medium, but also depends on the geometric structure of the illumination and hence this falls under the category of directional properties. Typically, the inherent properties are used to determine the budget for establishing the communication link whereas the apparent property calculates the ambient light levels of the communication system near the surface of ocean. The chemical composition of sea water causes the inherent properties that includes scattering, absorption and attenuation coefficient. Radiance, reflectance factor and irradiance are the apparent optical properties and are determined by the geometric properties of the light beams (Kumar et al., 2019).
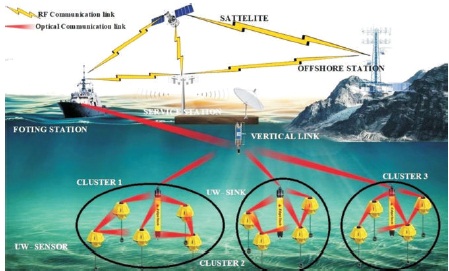
Figure 11. Underwater Optical Communication Network (Ali et al., 2019)
The most significantly used inherent property is the attenuation co-efficient (c), which is used to find out the loss of optical power meter and is measured in m-1. It is obtained by considering the unsuccessful reception of photons which are transmitted always in an inhomogeneous medium. One of the possibilities is that, the photons are redirected by a refractive index boundary and it is faced in both scattering and absorption gives rise to attenuation (Kumar et al., 2019).
Absorption and scattering are the two crucial effects that affect the propagation of optical waves underwater (Zeng et al., 2016). We can understand the simple phenomena of these two factors by the geometrical model of a water element that has shown in Figure 12. If the input beam of light strength Pi(λ), the small fraction of incident beam Pa(λ) absorbed and fraction Ps(λ) scattered by water element. The unaffected result Pc(λ) passing through water element whose volume is δV and thickness δr respectively. According to energy conservation balancing, the absorption and scattering phenomena can be described as (Kaushal & Kaddoum, 2016).
Pi(λ) = Pa(λ) + Ps(λ) + Pc(λ)
The overall attenuation in underwater coefficient c(λ) can be expressed as,
c(λ) = a(λ) + b(λ)
The values of a(λ) and b(λ) in different water medium could be found from Table 3.
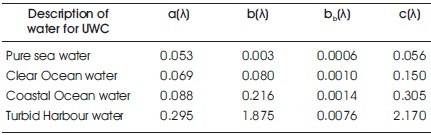
Table 3. Typical Values of Absorption and Scattering Coefficients in Different Water Mediums (Hanson & Radic, 2008)
The transmission range of optical communication is affected by absorption resulting in the continuous increase in the energy spent for emitting the light beam. On the other hand, scattering effect causes the light photons to spread across the directions resulting in the reception of the light by the receiver and some of the portions may reach the receiver with a delay due to the propagation paths. Thus, scattering results in phenomenon are called as inter symbol interference (ISI), time-jitter and multipath fading. Figure 12 shows that pure sea water is less absorptive in nature around 400 - 500 nm which is the bluegreen region of the visible light spectrum. Figure 13 shows the absorption coefficient of sea water (Kumar et al., 2019).
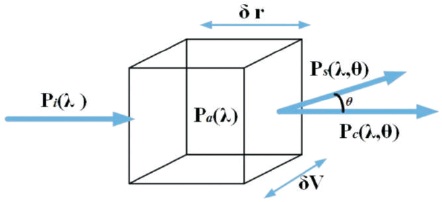
Figure 12. Optical Wave Scattering and Absorption Phenomena Underwater (Kaushal & Kaddoum, 2016)
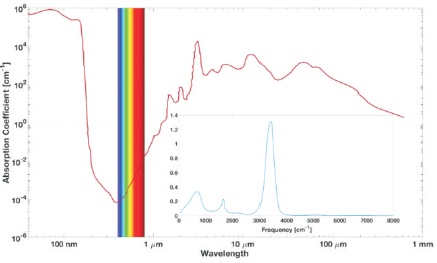
Figure 13. Absorption Co-efficient of Sea Water (Saeed et al., 2018)
These are the critical tasks in the engineering aspects required to maintain a constant and reliable link between the optical transmitter and receiver. These are caused by the result of misalignment of boresight and jitter. Boresight is the fixed misplacement observed in the transmitter trajectory and the centre of receiver aperture. This can be overruled by precise location information and pointing. Jitter is found to be a problem occurred by the random nature of environment of ocean which is not under any control. Due to the high dispersion effect, the scattering and tight pointing effects are comparatively reduced (Kaushal & Kaddoum, 2016).
Multipath fading and delay spread are caused by the scattering and reflection effects where some portion of the light beams travel in different path and reaches the receiver at different instant. This causes the time dispersion also called as delay spread. Multipath fading is more significant in shallow water due to more reflection caused from the surface of the sea water, nearby obstacles and seabed. However, channel characterization based on the Monte-Carlo simulation proves that the time spread is found to be negligible in short distance optical communication (Kumar et al., 2019).
Noises in underwater optical communication: There are different types of noises in UWOC such as quantum shot noise, optical excess noise, optical background noise, photo-detector dark current noise and electronic noise (Jaruwatanadilok, 2008).
The quantum noise: This type of noise occurs due to receiving random variation of photons by optical receiver. The optical excess noise: The Optical excess noise is caused due to transmitter imperfection.
The background noise: In this type of noise the background is considered as a blackbody radiation in underwater whose primary source is the refracted sunlight from the water surface. Due to this phenomena, the solar and blackbody radiation background noises occur.
The photo-detector dark current noise: Due to electrical current leakage from photo-detector this kind of noise occurs (Ali et al., 2019).
Just like in acoustic communication, multipath interference is produced in optical underwater channel when an optical signal reaches the detector after encountering multiple scattering objects or multiple reflections from other underwater bodies. This eventually leads to waveform time dispersion (time spreading) and decreases the data rate due to ISI. However, the effect of multipath interference is not much pronounced in UOWC in comparison to acoustic communication due to very large speed of light. The amount of multipath interference depends upon system specifications and the propagation environment. For shallow water environment, optical waves reflected from surface or bottom generate multiple signals at the detector. For deep oceans, these surface and bottom reflections can be ignored. Advanced signal processing techniques such as channel equalization and adaptive optics are used at the receiver to suppress interference (Kaushal & Kaddoum, 2016).
As the optical beam is very narrow, any living organism such as school of fish or marine animals will cause momentary loss of signal at the receiver. This requires the use of appropriate error correction techniques, signal processing techniques and redundancy measures to ensure re-transmission of data when lost. The two most widely used error correction techniques in underwater environment is automatic repeat request (ARQ) and forward error correction (FEC). Signal processing techniques also help in improving the optical link quality and make the system robust against physical obstruction (Kaushal & Kaddoum, 2016).
There are three basic types of underwater optical link configurations:
(i) Direct LOS links, (ii) NLOS links and (iii) retro-reflector links.
Direct LOS (line of sight) link is the most simple, unobstructed and point-to-point underwater connection between transmitter and receiver. This link is fairly well to implement in case of static transmitters and receivers such as two sensor nodes at the bottom of the ocean. It works well in clear oceans where the transmitter directs a narrow beam signal towards the receiver. However, there are large chances of obscuration due to marine life growth, schools of fish or other obstacles. LOS link configuration is shown in Figure 14 (Kaushal & Kaddoum, 2016).

Figure 14. LOS Configuration (Kaushal & Kaddoum, 2016)
Non-line-of-sight (NLOS) radio propagation occurs outside of the typical line of sight (LOS) between the transmitter and receiver, such as in ground reflections. Near-line-of-sight (also NLOS) conditions refer to partial obstruction by a physical object present in the innermost Fresnel zone. This NLOS geometry can be used for configuration of submarine networks. However, an ideal assumption of stable sea surface and negligible scattering may differ from the realistic systems. Figure 15 explains the NLOS configuration.
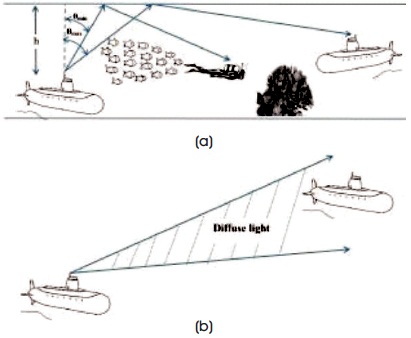
Figure 15. NLOS Configuration: (a) Reflective (b) Diffuse (Kaushal & Kaddoum, 2016)
Retro-reflector links are used in limited duplex communication where receivers have low power to support full transceiver operations. Here, the source has more power and payload capacity than the receiver.
Therefore, it serves as an interrogator which sends modulated light signals towards the remote receiver. The receiver is equipped with a small optical retro-reflector which upon sensing the incoming interrogating beam from the source reflects it back to the source. The retro-reflector underwater works in two scenarios: (i) photon limited and (ii) contrast limited. The photon limited scenario occurs in clear ocean water or lakes. In this case, the link range and capacity is limited by the amount of photons falling on the detector due to absorption underwater. Moreover, pointing and tracking is crucial in this case as the information bearing retro-reflected signal is dependent upon the density per unit area of interrogating photons incident on the retro-reflector. Contrast limited scenario occurs in turbid harbours where scattering plays an important role in link range and capacity. Figure 16 shows retro-reflector configuration (Kaushal & Kaddoum, 2016).
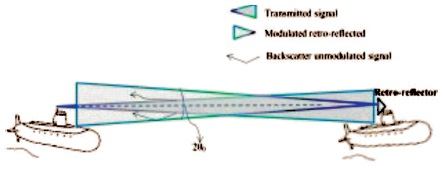
Figure 16. Modulating Retro-Reflector Configuration
Underwater optical wireless communication has high bit rate, low power requirement and less latency, but its transmission range is only few meters. On the other hand, acoustic communication has less bit rate, larger power consumption, significant latency but a longer range. Acoustic modems can operate between 100 and 5000 bps over moderate link distances or at higher data rates for shorter distances. Therefore, in order to take advantage of both of the technologies, a hybrid system is necessary. The hybrid system will complement the existing acoustic system by providing high data rate and low latency when operating within optical range and with long range and robustness when operating outside optical range. The purpose of underwater AUVs or sensors underwater is to relay a high volume of data to the central base station where the information is processed. These AUVs are equipped with both acoustic and optical modems. The acoustic modem is used for long distance communication and the optical modem is used for short distance communication after the alignment is assisted by acoustic communications. Therefore, in hybrid systems, optical transmitters occupy most of the uplink bandwidth by transmitting highly-directional high bandwidth signals. The downlink signal from the base station or ship to AUVs is a low frequency acoustic signal with wide Field-of-View (FoV) for the purpose of pointing or tracking of the AUVs. In the linear regime of optical-acoustic conversion it is explained (Blackmon et al., 2005; Kaushal & Kaddoum, 2016).
The hybrid acoustic optic system has significant advantages in terms of throughput and energy efficiency as shown in Figure 17. It is seen from Figure 17(a) that the throughput of acoustic channel saturates as the offered load increases. The throughput increases drastically with only optical as well as hybrid channel models though the hybrid model outperforms the other two. Figure 17(b) clearly indicates the increase in power consumption of acoustic signals with data rate. In this case, both hybrid and optical models yield comparable results. Therefore, the hybrid acousto-optic system provides some degree of freedom to select the optimal transmission method within least transmission time depending upon the load and water type (Kaushal & Kaddoum, 2016).
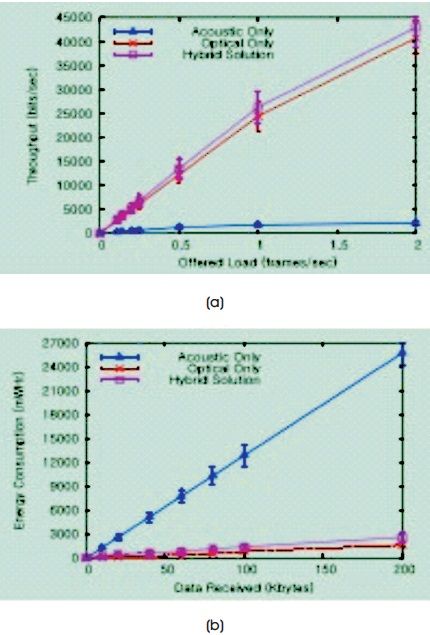
Figure 17. Comparison of (a) Throughput and (b) Energy Efficiency for Acoustic, Optical and Hybrid Systems (Han et al., 2014)
Table 4 shows the comparison of underwater communication systems (Saeed et al., 2018; Shi et al., 2012).
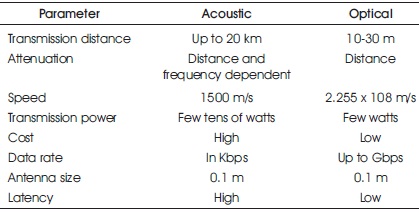
Table. 4 Comparison of Underwater Communication Systems (Kumar & Rani, 2019)
These comparative studies on various acoustic modems explain that the performance of the systems depends on the following as type of modulation, implementation board, frequency and transducer and power consumed. The commercial modem can achieve long distance with higher energy consumption. The following will explain about the improvement study on the underwater modem to enhance the performance of the system in terms of power, bandwidth and simulation model (Annalakshmi, 2017).
Sánchez Matías et al. (2015) presents modem design with asynchronous wakeup circuit in order to avoid the additional transducer in the modem with lower energy consumption. An acoustic wake up circuit is used to minimize the power consumption in the transmitter and receiver. Harris et al. (2009) proposed an asynchronous idle power management system along with the properties of acoustic modem. Two techniques is used for idle-time power management to improve the energy efficiency in underwater acoustic modem and is compared. Bahr et al. (2009) proposed an algorithm for AUVs. An algorithm provides possible solution to the acoustic modem where the range and estimation of dead line is measured. This algorithm is best suitable in the bandwidth limited environment (Annalakshmi & Murugan, 2017).
Existing mechanisms for conventional modems need to be modified, or even interchanged to suit the newly emerged technology. The view and progress expected for development of high frequency underwater modems as shown in Figure 18 should address on the following issues (Annalakshmi & Murugan, 2017; Bourré et al., 2013; Cabral, 2014; Jeon et al., 2012; Li et al., 2008; Paradis et al., 2014; Sánchez et al., 2011).
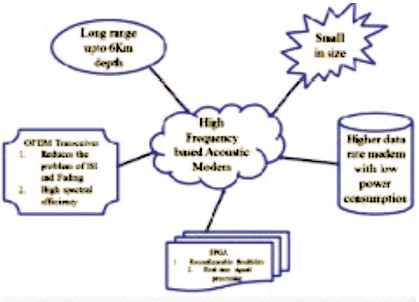
Figure 18. Future Direction for Underwater Modem (Annalakshmi & Murugan, 2017)
Figure 19 shows the emerging technologies in UWC.
Figure 19. Emerging Technologies in Underwater Communication (Ali et al., 2020)
Underwater sensor networks (UWSNs) is a group of sensors deployed to record and explore data from deep-sea environment (Guo et al., 2009). The sensor networks may be wired or wireless that exchanges information with the buoy or base stations. In general, UWSNs are used in oceanography studies, seismic surveillance, monitoring marine life, natural disaster control, etc., (Akyildiz et al., 2005). UWSNs architecture has been used in the detection of natural oil and gas resources, military operations and tactical surveillance applications (Gkikopouli et al., 2012). UWSNs, in order to send and receive signals from the floating device on unknown coordinates, may require the specified coverage area for communication range. Remotely Operated Vehicles (ROVs) and AUVs are widely used to retrieve data from a monitoring device for shortrange using low power (Han et al., 2012).
Energy harvesting (EH) is an approach to capture and transform useful energy into usable electric power where energy required is in terms of heat, vibration and RF signals. Underwater wireless sensor network (UWSNs) is an emerging technique to establish reliable data although it requires high energy.
The wireless power transmission (WPT) technique is a promising EH technique (Ali et al., 2019; Perera et al., 2017).
Massive multi-input-multi-output (MIMO) supports underwater acoustic communication through large number of hydrophones array. It also supports the various types of multimedia communication contents in real time activities and audio-video conferencing (Li et al., 2009). Massive MIMO is a promising solution that support to improve throughput, capacity and energy efficiency of UWC system in the future (Ali et al., 2019).
Due to high demand of improving communication networking capacity, mmWaves are an alternative solution to support underwater communication. These waves offer similar characteristics with the optical wireless signals. Hence, mmWaves are considered to offer high bandwidth transmission and efficiency to improve underwater communication performances (Leeson & Higgins, 2018). The waves are capable to provide up to 10 Gbps data rates using hybrid communication techniques (Ali et al., 2019; DeMartino, 2017).
Non-Orthogonal multiple access (NOMA) offers desirable communication benefits and a promising multiple access technique. It allows to connect multiple users simultaneously and minimize delay. The future aspect of NOMA expected allocation schemes in underwater acoustic networks architecture (UWASNs) and equal transmission times (ETT) power allocation which are capable to prevent the wasteful resources generation in underwater environment (Ali et al., 2019; Cheon & Cho, 2017).
Internet of Things is an emerging technology that offers to connect devices wirelessly. The integration of Internet of Underwater Things (IoUTs) plays a significant role to allow data exchange between UWSNs to the base station in underwater environment. IoUTs provide an opportunity for the observation of marine life and understanding of underwater habitats (Ali et al., 2019; Kao et al., 2017).
5G is an extendable cellular technology to proliferate smart devices, and for the introduction of new emerging applications along with an exponential rise in wireless communication. Fifth generation wireless communication will be the future prospective wireless network with extremely low latency, high data rates, capacity and bandwidth as compared to 4G LTE (Long Term Evolution). According to survey (Agiwal et al., 2016; CISCO, 2017) the wireless network had more than half of connected devices and an exponentially rise in internet traffic by 51% in 2016 as compared with 32 percent of the growth in average traffic. Internet traffic will tremendously increase by 2021 throughout multimedia devices, video streaming and smartphones over 63% (CISCO, 2017). 5G would have great impact among the new applications, suggested by researchers such as the Internet of Things (IoT), Smart cities projected applications, Device-to-Device (D2D) communication, Internet of Underwater Things (IoUTs) and also in underwater wireless communication (Pirinen, 2014). In a sur vey by Pirinen (2014) on 5G wireless communication, the various key points, effects, and advantages were discussed. The filter bank multi-carrier (FBMC) and generalized frequency division multiplexing (GFDM) are the new promising approaches to support underwater channel communication towards 5G wireless network. An experimental technique based on GFDM and FBMC in underwater wireless communication has been suggested by Wu et al. (2017). GFDM is time and frequency based multicarrier transmission scheme that is derived from FBMC. The transmitting data is divided into subgroups and sub-carriers. Some of the constraints in the current cellular technology can be overcome by the fifth generation wireless network in terms of enhance the quality of service (QoS) and quality of energy (QoE) (Agiwal, et al., 2016; Ali et al., 2019).
The 5G wireless networking technology has improved users perceived QoS (Agiwal et al., 2016). Covering all aspects, 5G wireless network is a panache of user problems and requirement. Besides 4G LTE enabling technology, a gradual evolution is the necessity of user-oriented smart machinery equipment for e-health solution, e-business, and IoUTs towards 5G networking are imagined. These advanced tools and devices such as the UWSNs and onshore base station are the future aspects for implementing new wireless networking environment. The emerging wireless techniques are expected support the improvement in bandwidth in the under water environment. 5G wireless system is expected to expand into public and private sectors, healthcare, software services, smart homes, Internet of Health Things (IoHTs) and in underwater communication to perceive high data rate. The possibility of acquiring high data rate and monitoring underwater activities rely towards the 5G network and an experimental technique based on GFDM and FBMC in underwater wireless communication will be the future communication medium (Wu et al., 2017). Despite, the utilization of radio frequencies (RF) for fifth generation communication, it could offer difficulty in channel estimation. The high demand for potential applications, for exploration of natural underwater resources and monitoring of the marine environment, is investigated (Akyildiz et al., 2006). The concept of massive MIMO for underwater acoustic (UWA) channel and FBMC modulation technique is proposed towards 5G wireless carrier (Aminjavaheri & Farhang-Boroujeny, 2015). Most of the researchers publish their work to improve UWC functionality. In one of the survey article on 5G multicarrier underwater wireless communication, the author has a discussed and compared the different wireless communicative generation and related issues on physical layer (Wu et al., 2017). 5G wireless networking system is a highly recommended for its high latency, data rate and bandwidth propagation between the Device-to-Device (D2D) and Machine-to-Machine (M2M) for a longer time duration in particular domain (Agiwal et al., 2016). A GFDM experimental model technique on 5G network and its implementation in UWC is proposed (Jinqiu et al., 2018; Wu et al., 2017). The experimental work on 5G wireless network in underwater domain, named GFDM is also mentioned in Jinqiu et al. (2018).
In the recent advancements within the field of technology and science, acoustic/optical underwater communication are often considered as a typical underwater communication and UWC technology could also be a platform to make up a network connection between underwater devices with offshore base stations. Most of the underwater modems operate in low frequency. Low attenuation, high bandwidth, and improved rate are frequently attained by employing high frequency, albeit at the expense of a range of a few thousand metres. The primary obstacles in underwater acoustic/optical communications, according to the summary of research developments at UWC, include noise and attenuation, absorption and scattering, multipath, pointing and alignment, and path loss, among others. A variety of link configurations for optical communication are also discussed.
The underwater acoustic/optical modems are developed and utilized in several applications like oceanographic data collection, water quality monitoring and military purposes etc. The foremost outline of this paper is to encourage research efforts and development of latest advanced communication techniques. This paper has been contributing and providing a survey of the design issues, recent advances and future challenges in underwater networks and communication of entire technologies towards subsequent generation wireless networking system. The emerging technologies in UWC including the architecture of UWSNs are challenging and more sophisticated for signal propagation. 5G wireless networking techniques are used to support RF, acoustic and optical signal carrier for improving communication probabilities. This paper specifies some key configuration parameters that has been targeting to reinforce the performance of the acoustic/optical modems.