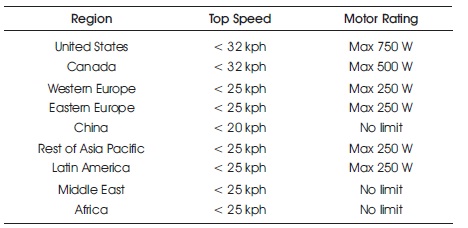
Table 1. E-bicycle Definition Across the Globe
The goal of this research paper is to promote the use of clean energy by incorporating it in a bicycle. In today's fast forwarding world, where one is always in transit from one place to another, has greatly exploited the conventional energy resources, thus compromising environment as well as one's own physical health. Hence this paper not only aims at utilizing a clean energy source, but also promotes a healthy lifestyle in such a busy world. In this work, a pedal assisted ebicycle allows the rider to make use of an electric motor providing a higher speed and comfort along with pedaling at a more even terrain. Current scenario of use of e-vehicles has greatly diverted the attention of the people towards adopting such means of transport thereby increasing the chances of success of this research work.
This paper presents a review of the pedal assisted e-bicycle, its construction, working, components involved and, various power calculations involved. Ogden Bolton Jr. was the first person who was granted a US Patent for a electric bicycle incorporating a 10 V battery and 6-pole brush and commutator Direct Current (DC) hub motor mounted in the rear wheel (Tremblay & Dessaint, 2009). Since then a lot of ground breaking technological advancements have been made in this field, such as use of Li-ion batteries, BLDC motor, controller operating technique to name a few. The result of such advancement in technology has resulted in reducing the overall weight of the vehicle that improves its efficiency to provide a better response and achieve higher speeds. The norms decided by Indian Government limits the rating of motor used at 250 W and the speed at 25 kmph above which the vehicle needs to get registered. (Vinatha et al., 2008). Hence by keeping such norms under consideration, the authors have incorporated it with a 250W PMDC motor operating at a voltage of 24 V provided by a 24 V 12 Ah lead acid battery pack. The control of the motor is achieved by a PWM based speed controller. The details of these components are discussed further in this paper along with numerical calculations.
Depending upon various factors like top speed, motor size, and other requirements, an e-bicycle holds different meaning across the globe as shown in Table 1.
Table 1. E-bicycle Definition Across the Globe
“E-Bike” can be thought of as an outcome of various factors as well as solution for many other problems.
The increment rate of E-bike is different in different regions of the world. The various factors may include population, pollution, infrastructure and need and usage of people.
Some of the factors are mentioned below,
The Annual E-bicycle Sales in Various Regions as shown in figure 1.
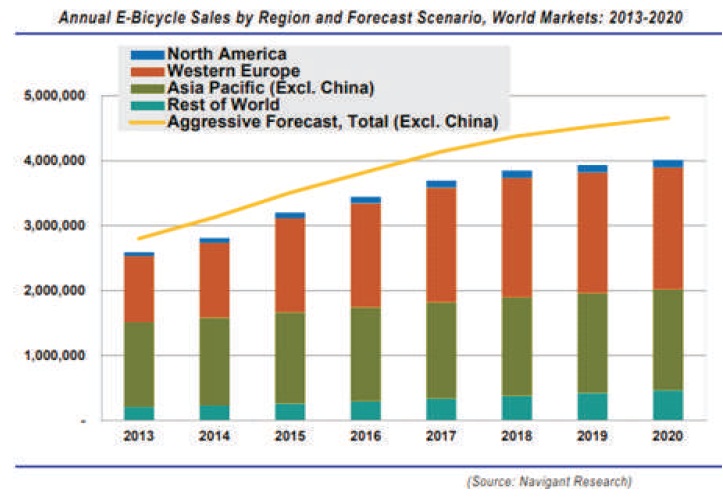
Figure 1. Annual E-bicycle Sales in Various Regions
The motor used in this work a 24 V 250 W gear PMDC type mounted at the rear end of the bicycle making it a rear drive e-bike.
The specifications are as follows.
The source of electrical energy powering the motor and other components is a 24 V 12 Ah battery pack consisting of two 12 V lead acid batteries connected in series configuration.
The bicycle used in this case is made up of commonly used steel frame. The design of bicycle chosen is such that it can bear the weight of the rider as well as other equipments installed on the bicycle. The motor is mounted near the rear wheel on a steel plate, which is welded to the frame of the bicycle.
Transmissions of rotary motion from the motor to the bicycle are achieved by using a set of chain and freewheel. The freewheel used for the motor has 22 teeth unlike the original freewheel of bicycle, which has only 18 teeth (Cong et al., 2010). A large number of teeth helps us to achieve higher torque enabling the bike to carry a heavier load.
The brakes utilize both mechanical and electrical components. The rim brake pads help in reducing the speed of bicycle by friction force against the rim of the bicycle and at the same time, sends a signal to the controller to cut electrical supply to the motor preventing the bike from undue acceleration (Arsie et al., 2006).
Throttle or an accelerator has been used to control the speed of the motor. The use of throttle sends a signal to a PWM based controller, which adjusts the average voltage supplied to the motor depending upon the position of the throttle (Ehsani et al., 2018). The use of throttle changes the duty cycle of the controller which helps in achieving the above action.
The controller used here utilizes PWM technique to control the speed of the motor. It integrates motor driving IC specially designed for motor controlling applications in E-bike. Its features include electric brakes and speed control through potentiometric throttle.
With the proper arrangement of different components that were mentioned above, the e bicycle can yield better efficiency. The proper arrangement of components include setting up of different components so that it does not affect the overall dynamics of the bicycle. Improper arrangement of motor that weight around 2.4 kg might affect the centre of gravity of bicycle and the process will reduce the efficiency and comfort of the rider.
The 250 W PMDC motor runs on a 24 V supply that is given by 2 batteries of 12 V each connected in series while in driving mode, and in parallel during charging mode. Whether the batteries are connected series or parallel, it is governed manually by a toggle switch, which when switched to drive position connects the batteries in series and in parallel while charging. The power flow from batteries to motor is governed by a PWM based controller. (Wilson, 2004; Gaines, 2014).
The battery pack used here is a lead acid type whose power to weight ratio is less compared to a lithium ion battery of the same power rating. Therefore in order to reduce the weight of the battery and consequently the weight of the cycle, one can use a lithium ion battery. Reduction in weight of the cycle will result in better efficiency in the range that the cycle can cover (Faria et al., 2014).
The motor used here is PMDC motor which when compared to BLDC has lower efficiency and low starting torque.
The design includes location of components over the bicycle in such a way that it does not affect the dynamics and comfort of the rider. A BLDC motor when used gives us the option to setup the motor at three different locations that is front, rear, and mid drive (Goodman, 2010). Of all the three positions, the mid drive provides better stability when compared to other positions and is most commonly used by manufacturers since the centre of gravity is not much affected.
The cycle frame can be modified according to one's comfort, but since the frame comprises of most of the weight of the system, one can use carbon fibre instead of steel or other type of frame in order to reduce the weight of the system and eventually will enhance the efficiency.
Different parameters that an individual will look upon along with their values are tabulated in Table 2. Depending upon the weight of the rider and slope of road, parameters, such as speed, distance, and torque may vary from the values given in the following table.
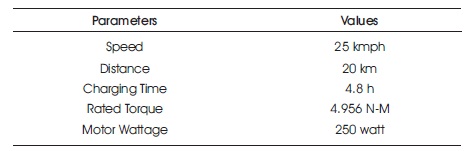
Table 2. Parameters with their Values
With these value of parameters, e- bike is good for both sloppy and flat road condition and can perform with high efficiency. The motor performs well under high stress condition during hilly ride. Charging time is good with respect to the average distance it covers in one charge. The speed of e-bike is good for small commute and suits students, and nearby marketing rides.
With modifications in design of the bicycle, two people can travel on it, so that it can be thought of as a bike. Further, a motor with greater rating and performance can give better speed and performance. With the use of lithium ion battery, battery management system and battery swap provision, one can achieve better battery performance. Principle of regenerative braking can be used to charge the battery while pedaling (Muetze & Tan, 2007).
As shown in the Table 1 and Figure 1 of literature survey, the authors conclude that e-bike holds great application in future because of the advantages it provides. The various advantages that an e-bike holds are simplicity, lightweight, cheap cost, and reliability. Most important of all the advantages is that it consumes no fuel and thus produces no pollutant, which is a major factor to think ebike as an substitute for other bikes that consumes fuel. The maintenance of e-bike is not an important concern because of very few components used and its simplicity.